Виды массивов |
  
|
Виды массивов |
|
Все 3D массивы, создаваемые в T-FLEX CAD, можно разделить по способу копирования на следующие виды:
● Линейный;
● Круговой;
● По точкам;
● По путям;
● Параметрический.
Линейный массив
Линейный массив (команда "3AL") создаётся путём размещения копий исходных объектов вдоль одного или двух направляющих векторов. В зависимости от числа направляющих векторов создаётся одномерный либо двумерный массив. Все элементы линейного массива лежат в одной плоскости.

Направляющие векторы линейного массива задаются либо двумя 3D точками (вектор будет направлен от первой выбранной точки ко второй), либо одним 3D объектом, способным определить вектор в пространстве.
Размер массива вдоль каждого направления характеризуется количеством копий, шагом их размещения и общей длиной массива по данному направлению. Для задания массива достаточно указать только два параметра из трёх. В зависимости от используемого режима это могут быть:
●количество копий и шаг;
●общая длина и шаг;
●количество копий и общая длина.
В любом режиме один из задаваемых параметров (шаг массива или общая длина в данном направлении) может вычисляться системой автоматически на основе длины вектора направления и значения второго параметра.
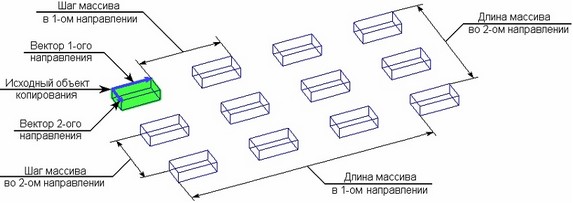
Число копий вдоль каждого вектора направления всегда учитывает исходный объект копирования (даже если он не включается в состав массива). Например, на предыдущем рисунке показан массив, содержащий 4 копии вдоль первого вектора направления и 3 копии вдоль второго вектора направления.
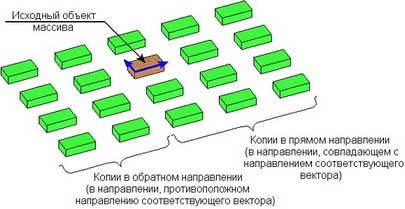
В линейном массиве можно создавать копии не только в прямом, но и в обратном направлении вдоль каждого направляющего вектора. Копии в обратном направлении строятся с тем же шагом, что и в прямом направлении вдоль данного вектора. Количество копий в обратном направлении либо совпадает с количеством копий в прямом направлении вдоль этого вектора, либо задаётся отдельным числовым значением.
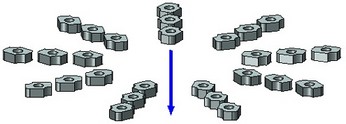
Круговой массив
В круговом массиве (команда "3AR") копии размещаются по окружности вокруг оси массива. Ось вращения кругового массива, как и направляющие векторы в линейном массиве, задаётся выбором двух 3D точек или одного 3D элемента, способного определить вектор в пространстве.
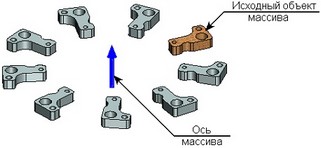
Положение элементов массива вокруг оси определяется количеством копий, шагом вращения каждой копии и общим углом вращения элементов массива вокруг оси. Шаг вращения копии определяет, на какой угол надо повернуть исходное тело вокруг оси для получения первой копии. Вторая копия создаётся поворотом первой на тот же угол и т.д. Вращение осуществляется по часовой стрелке (при направлении взгляда вдоль оси массива).
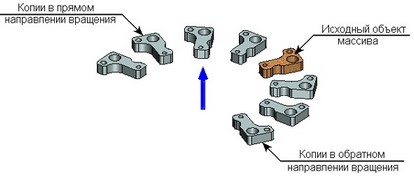
Допускается вращение в обратном направлении, в том числе создание копий одновременно в двух направлениях – прямом и обратном. Вращение в противоположном направлении осуществляется с тем же шагом, что и в прямом направлении (количество копий может отличаться).
Для задания массива достаточно указать только два определяющих параметра из трёх, например:
●Количество копий и шаг;
●Общий угол и шаг;
●Количество копий и общий угол.
Третий параметр вычисляется системой автоматически.
Шаг вращения или общий угол элементов массива можно задать с помощью двух дополнительных 3D точек. Требуемый угол будет равен углу между плоскостями, проходящими через ось вращения и соответствующую 3D точку.
При создании копий возможны два варианта ориентирования копий: с поворотом и с использованием параллельного переноса. В первом случае для создания копии исходное тело действительно поворачивается вокруг оси массива. Во втором случае исходное тело копируется без доворота относительно оси (т.е. ориентация каждой копии в пространстве совпадает с ориентацией исходного тела).


Круговой массив также допускает создание копий во втором направлении: вдоль радиус-вектора массива (элементы массива будут располагаться в одной плоскости, образуя рисунок в виде концентрических кругов) или вдоль оси (элементы массива располагаются по поверхности цилиндра).

Количество копий вдоль второго направления задаётся так же, как и в линейном массиве.
Массив по точкам
Для создания 3D массива по точкам (команда "3AN") указывается базовая 3D точка на исходном объекте массива и любое количество целевых 3D точек (в которые необходимо скопировать исходный объект). Элементы массива будут расположены в заданных 3D точках.
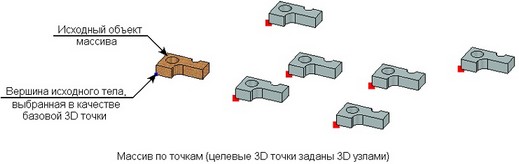
Целевые точки массива задаются последовательным выбором отдельных 3D точек (3D узлов, вершин тел и т.п.) или массивов 3D узлов. У одного и того же массива в список целевых точек могут входить одновременно и 3D точки, и массивы узлов.
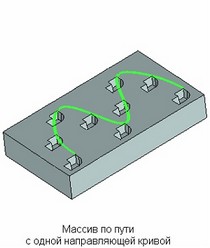
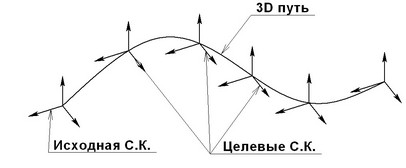
Массив по пути
В массиве по пути (команда "3AP") расположение элементов массива определяется одним или двумя 3D кривыми. Такой массив можно рассматривать как аналог линейного массива, но с расположением копий не вдоль прямых, а вдоль одной или двух пространственных кривых. В качестве таковых используются любые 3D кривые (3D пути, 3D профили, криволинейные рёбра и т.п.). В тех случаях, когда выбирается замкнутая 3D кривая, дополнительно указывается 3D точка, проекция которой на выбранную кривую определит начало направляющей кривой массива.
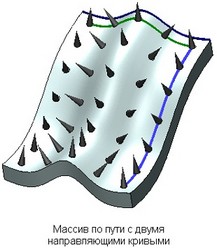
При использовании одной направляющей кривой строится одномерный массив, при двух направляющих кривых – двумерный массив по пути. Для простоты рассмотрим сначала создание массива с одной направляющей кривой.
Расположение копий (элементов массива) вдоль направляющей кривой зависит от следующих параметров массива: количество копий, шаг и общая длина массива вдоль данной кривой, а также способ позиционирования копий.
Количество копий, шаг и общая длина массива вдоль направляющей кривой - параметры взаимосвязанные. Для задания массива достаточно указать любые два параметра из трёх. Недостающий параметр будет рассчитан системой самостоятельно. Общая длина массива может быть взята с направляющей кривой (система определит длину кривой и найденное значение будет считаться длиной массива вдоль данного направления).
Общая длина массива не может превышать длину направляющей кривой.
Тип позиционирования определяет:
- Расположение точек привязки копий (элементов массива) вдоль направляющей кривой. В зависимости от используемого типа позиционирования шаг массива по пути определяет либо расстояние вдоль пути между точками привязки копий, либо длину хорды пути.
- Ориентацию копий в пространстве. Положение копий в пространстве определяется путём совмещения исходной системы координат объекта копирования (т.е. исходного объекта массива) с целевой системой координат каждой копии. Исходная система координат создаётся в начале направляющей кривой, целевая – в точке привязки копии. Направление осей обеих систем координат определяется типом позиционирования копий.
Способ позиционирования копий может быть следующим:
●Со смещением по пути. Целевые системы координат всех копий размещаются на пути в соответствии с установленными параметрами шага и количества копий. Направление осей этих систем координат постоянное и не зависит от геометрии 3D пути. Данный способ позиционирования можно применять, когда нужно расположить копии исходного тела вдоль направляющей кривой с сохранением пространственной ориентации копии как у исходного тела.
●С минимальным кручением. Ось X целевой системы координат каждой копии направляется таким образом, чтобы обеспечить плавное вращение от положения вектора кривизны в начале пути к положению вектора кривизны в конце пути. Ось Z всегда направлена по касательной к пути в точке начала координат текущей копии. В качестве примера применения массива по пути с минимальным кручением можно привести модель конвейерной ленты.
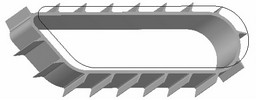
Данный пример находится в библиотеке “Примеры 3D”, в папке “Трехмерное моделирование\Массивы\_Конвейер.grb”.
●По хорде. Из начала пути, в котором располагается исходная система координат, строится сфера радиусом, равным заданному шагу массива. К точке пересечения сферы и 3D пути будет привязана вторая копия. Из полученной точки строится новая сфера и т.д. Таким образом определяются все точки привязки копий. В таких точках располагаются целевые системы координат копий. Ось Х целевой системы координат сориентирована по предыдущей хорде 3D пути. Хорда пути образуется двумя соседними точками привязки копий. Исходная система координат расположена в начале пути. Её ось Х направлена на точку расположения первой копии. Шагом массива при использовании данного типа позиционирования копий является длина хорды 3D пути. Данный способ позиционирования может успешно применяться, например, при моделировании гусеничных лент или цепных передач.
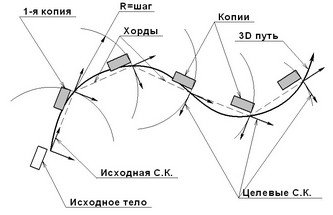

Пример модели гусеничной ленты находится в библиотеке “Примеры 3D”, в папке “Трехмерное моделирование\Массивы\_Гусеница.grb”.
Двумерный массив по пути создаётся аналогично. Для второй направляющей кривой также задаются количество копий, шаг и общая длина массива в данном направлении, способ позиционирования копий. Обратите внимание, что в качестве исходного объекта в данном направлении будет использоваться целиком результат создания одномерного массива вдоль первой направляющей кривой.


Параметрический массив
Параметрический массив (команда "3AA") использует универсальный механизм, позволяющий получать массив путём параметрического копирования исходного элемента. Этот же механизм используется в операции "3SA - Тело по параметрам" и в одном из режимов создания 3D пути. Работа такого алгоритма подробно описана в команде "Тело по параметрам". Поэтому в данном параграфе приведено лишь краткое описание алгоритма и характерные примеры.
Файлы примера находятся в библиотеке “Примеры 3D”, в папке “3D моделирование. Операции\Массив\_Винтовая лестница.grb”.
Параметрический массив может быть только массивом Тел, операций или элементов построения. Параметрический массив граней создать невозможно.
Для создания параметрического массива необходимо определить закон, по которому будет рассчитываться так называемая система координат текущей копии. Копирование исходного объекта массива осуществляется в направлении от исходной системы координат к рассчитанной целевой системе координат текущей копии.
В качестве исходной системы координат пользователь может выбрать одну из локальных систем координат модели. Если локальная система координат не выбрана, то в качестве исходной системы координат используется глобальная система координат.
Система координат текущей копии (т.е. положение её начала и ориентация осей) может определяться одним из двух способов:
●Свободная ориентация копии. Законы изменения параметров системы координат текущей копии описываются с помощью выражений.
●Ориентация копии по 3D кривым или поверхностям. Для определения положения в пространстве системы координат текущей копии используются существующие 3D кривые или поверхности других тел. Управляя системой координат копии, пользователь управляет положением каждой копии.
Управление системой координат копии осуществляется через параметры массива. Параметры подразделяются на два типа - управляемые параметры и управляющие параметры.
●Управляемые параметры – параметры, значения которых рассчитываются автоматически в процессе создания элемента. Для считывания значений таких параметров можно назначить независимые переменные.
●Управляющие параметры – поля, зависимости в которых задаются пользователем. В поля управляющих переменных вписываются произвольные выражения, в которые можно включить любую переменную системы. Например, если включить в такое выражение переменную, отвечающую за номер копии, значение данного параметра будет зависеть от номера копии.
Некоторые параметры массива могут быть как управляющими, так и управляемыми. Ведущий параметр «номер копии» всегда является управляемым. Для него обязательно нужно выбрать независимую переменную, которой будет присваиваться текущее значение номера копии при расчёте операции. Номер копии автоматически изменяется в процессе расчёта массива от 1 до указанного количества с шагом 1.
Расчёт выполняется в следующем порядке: присваивается следующее значение номеру копии, рассчитываются управляющие параметры, вычисляются остальные управляемые параметры (если они есть), выполняется копирование.
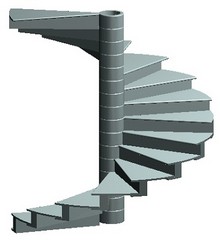
При использовании способа свободной ориентации копии достаточно выбрать исходный объект массива, задать количество копий и назначить независимую переменную на параметр «номер копии». Используя переменную, принимающую значения номеров копий, можно создать определённые зависимости в полях управляющих параметров, а также в 2D или 3D построениях, от которых, в свою очередь, будет зависеть положение и геометрия исходного тела.
Примером параметрического массива со свободной ориентацией копии является модель винтовой лестницы, приведённая на рисунке в начале данного параграфа.
Способ ориентации копии по путям или поверхностям удобно использовать, когда не удаётся точно описать закон изменения параметров копии с помощью выражений. В таких случаях бывает удобно использовать различные 3D кривые или поверхности для определения положения и ориентации системы координат текущей копии.
Смотри:Содержание , Команды T-FLEX CAD 3D в алфавитном порядке