Команда "3SW" - Создать тело по траектории |
  
|
Команда "3SW" - Создать тело по траектории |
|
Вызов команды:
Пиктограмма |
Лента |
|---|---|
|
3D Модель → Операции → По траектории Грани → Расширенные → По траектории |
Клавиатура |
Текстовое меню |
<3SW> |
Операции > По траектории |
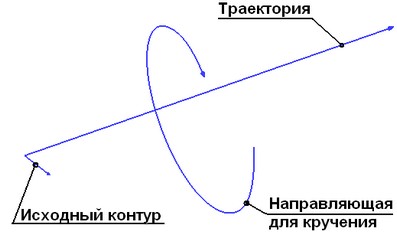
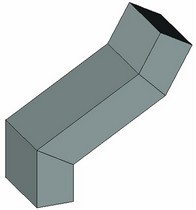
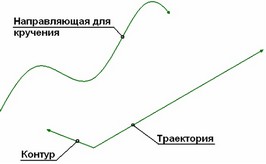
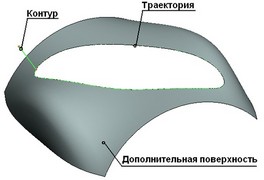
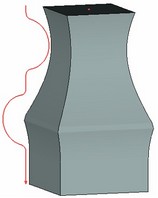
Данная операция позволяет получать трёхмерное тело путем перемещения контура вдоль пространственной траектории. Операция относится к группе т.н. «кинематических» операций, то есть результатом её выполнения будет тело-след от перемещения исходного контура. Перемещение выполняется вдоль направляющей. В зависимости от типа геометрии исходного контура (контуром может быть проволока или листовое тело) результат операции может представлять листовое или твёрдое тело. В процессе движения контура по траектории возможно управление законами его ориентации, кручения и масштабирования.
Основные возможности операции
Контур
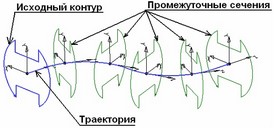
В качестве исходного контура может использоваться любой объект с проволочной или листовой геометрией. Также можно использовать многоконтурный 3D профиль. Движение контура получается за счет его многократного копирования вдоль выбранной траектории. Копии контура мы будем называть еще промежуточными сечениями. Для расчета промежуточных сечений система вычисляет ориентацию системы координат промежуточного сечения. Исходная система координат рассчитывается для запоминания исходного положения контура. Копирование контура происходит от исходной системы координат к рассчитанной системе координат промежуточного сечения.

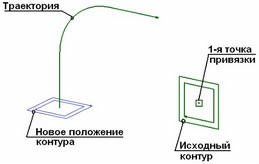
Исходная система координат контура вычисляется в первой точке траектории. Две её оси устанавливаются перпендикулярно траектории, а одна направлена по касательной к траектории в первой точке. Исходное положение контура фиксируется относительно исходной системы координат. Дальнейшее движение контура получается при перемещении исходной системы координат вместе с контуром в другие точки траектории, в которых рассчитана система координат промежуточного сечения.
Контроль над ориентацией контура
В зависимости от положения промежуточных сечений относительно траектории можно получить разные результаты. При создании операции можно установить один из трёх типов ориентации контура:
- Перпендикулярно траектории. Плоскость ХУ системы координат промежуточного сечения ориентируется всегда перпендикулярно пути. Вектор, касательный к направляющей в точке построения сечения, задаёт ось Z.
Режим предназначен в первую очередь для плоских контуров. При создании операции плоскость плоского контура всегда разворачивается перпендикулярно направляющей в каждой промежуточной точке.
В случае неплоского контура система сама вычисляет некоторую «среднюю нормаль», которую использует для ориентации контура. Для достижения наиболее предсказуемых результатов рекомендуется использовать дополнительную коррекцию исходного положения контура (см. раздел “Коррекция исходного положения контура”).

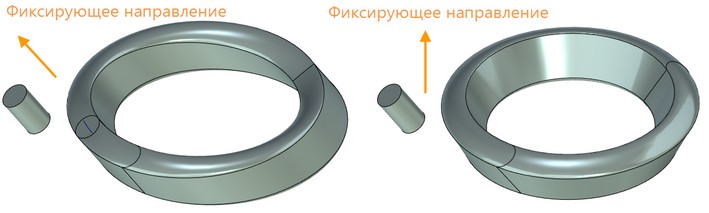
При использовании неплоской траектории условия перпендикулярности недостаточно для получения желаемого результата из-за кручения профиля вокруг траектории. В таких ситуациях может дополнительно указать фиксирующее направление. Задание фиксирующего направления меняет способ построения систем координат промежуточных сечений. Вариант изменения зависит от выбранного способа интерпретации фиксирующего направления: фиксация по пути и направлению, фиксация вращения.
Вектор, задающий фиксирующее направление, не должен совпадать с касательной к траектории ни в одной точке траектории.
Фиксация по пути и направлению: касательная к траектории в каждой точке траектории проецируется на плоскость, перпендикулярную к фиксирующему направлению. Система координат промежуточного сечения строится по полученной проекции касательной к траектории и по фиксирующему направлению.
Фиксация вращения: система координат промежуточного сечения строится по касательной к траектории в данной точке траектории и по векторному произведению фиксирующему направлению и касательной.
- Параллельно исходному. Оси системы координат каждого промежуточного сечения ориентируются также как и оси исходной системы координат. При полученном движении исходный контур перемещается параллельным переносом.

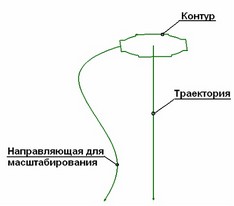
- По направляющим. При создании операции контур движется по траектории и направляется на точки дополнительных направляющих. Одновременно одна из направляющих задаёт и закон масштабирования контура. При данном способе направляющие должны иметь непрерывную функцию по касательной (не иметь изломов). Это – особый способ построения операции, который будет рассмотрен в отдельном параграфе (см. ниже). В некоторых частных случаях система допускает использовать поверхности для задания только ориентации (направления) движущегося контура.
Траектория и направляющие
Для создания операции можно использовать одну, две или три направляющие. Первая направляющая всегда выполняет функцию траектории, вдоль которой перемещается контур. В качестве траектории может выступать любой объект с проволочной геометрией. Чаще всего для задания траектории используется 3D путь, но можно также использовать 3D профили, набор рёбер, циклы и т.д.
Две дополнительные направляющие нужны для задания специальных законов кручения или масштабирования промежуточных сечений.
Коррекция исходного положения контура
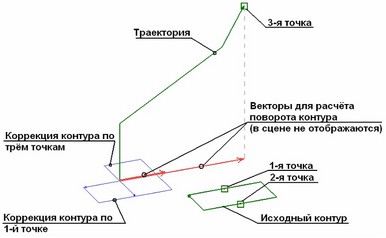
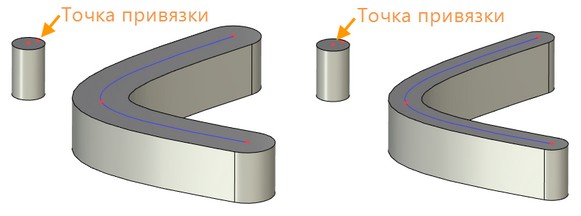
Исходное положение контура может быть дополнительно скорректировано выбором дополнительных одной или трёх 3D точек.
Одна точка позволяет задать место привязки контура к началу пути. Ориентация контура при этом зависит от выбранного метода ориентации. При установленном параметре «Перпендикулярно пути» плоскость плоского контура разворачивается ортогонально траектории в начальной точке. При использовании неплоских контуров система сама вычисляет некоторую «среднюю нормаль», которую использует для ориентации «плоскости» контура. При установленном параметре «Параллельно исходному» контур перемещается в начальную точку траектории параллельным переносом.
Коррекции исходного положения контура одной точкой может оказаться не достаточно, так как при этом не задан поворот контура вокруг его нормали. Для задания дополнительного разворота контура вокруг нормали можно выбрать еще две точки. Вторая выбранная точка вместе с первой определит исходный вектор поворота (по аналогии вектора привязки 2D фрагмента). Третья выбранная точка вместе с началом траектории определит целевой вектор поворота, проекция которого на «плоскость контура» будет использоваться для определения угла дополнительного поворота контура. Если используется неплоский контур, то «плоскость контура» определяется по вычисленной «средней нормали».
При использовании неплоских контуров в некоторых случаях можно и не добиться желаемого результата исходного положения контура с помощью трёх точек. В этом случае рекомендуется поместить контур в требуемое положение еще до создания операции «По траектории». Например, можно сразу создать его в нужном месте, а если это затруднительно, то можно использовать копирование по системам координат.
Кручение контура
При движении контура можно задавать дополнительный закон кручения контура. Угол поворота промежуточных сечений может быть задан в таблице или при помощи дополнительной геометрии – второй направляющей или поверхности. При этом есть значительные различия в способах расчета угла поворота контура.
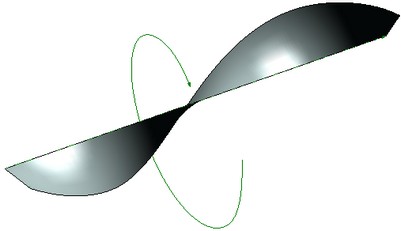
При использовании таблицы для задания закона кручения поворот на заданный угол каждого промежуточного сечения осуществляется вокруг оси Z рассчитанной системы координат.
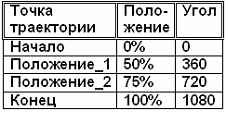
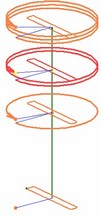
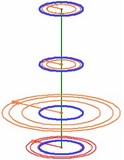
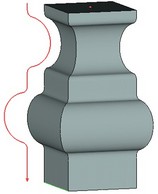
Таблица представляет собой набор точек траектории, заданных в процентах от длины траектории, в которых указано фиксированное значение угла поворота. При табличном методе задания углов поворота работают специальные манипуляторы. Этот способ удобно использовать для создания тел вдоль траектории, например, в которых поверхность закручена по спирали.


Использование кривой или поверхности предназначено для решения ряда специальных задач. Например, если контур в процессе движения должен быть направлен всегда на заданную кривую, то следует использовать направляющую.
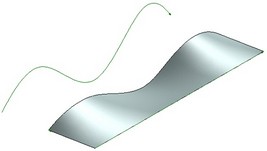
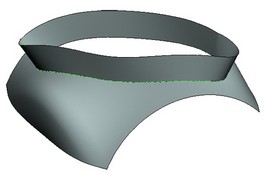
Если требуется создать дополнительную поверхность вдоль края какой-нибудь другой поверхности по касательной к ней, то для ориентации движущегося вдоль её края контура нужно выбрать поверхность. При этом будет соблюдено условие касания каждого промежуточного сечения вдоль края всей поверхности.
При построении тел с кручением контура с использованием направляющей или поверхности следует уделять особое внимание начальному положению контура. Так, для первого примера контур должен быть изначально направлен на первую точку дополнительной направляющей, а во втором случае контур в исходном положении должен прилегать по касательной к прилегающей поверхности.
При помощи дополнительной направляющей или поверхности система вычисляет вспомогательные векторы, чтобы получить значение угла поворота каждого промежуточного сечения. Угол поворота вычисляется как разница направлений вспомогательного вектора в первой точке траектории и вспомогательного вектора в текущей точке для каждого промежуточного сечения. Если вычисленный вспомогательный вектор не лежит в плоскости XY системы координат промежуточного сечения, то он дополнительно проецируется на эту плоскость.
При использовании поверхности для вычисления вспомогательного вектора, его направление в общем случае вычисляется как касательная к поверхности в точке этой поверхности, ближайшей к точке начала системы координат промежуточного сечения. В связи с этим для получения наиболее прогнозируемых результатов желательно, чтобы используемая поверхность вплотную прилегала к траектории. Например, для задания траектории в этом случае можно использовать ребра этой поверхности.
Если используется направляющая для вычисления углов поворота промежуточных сечений, то можно выбрать один из четырех методов вычисления вспомогательного вектора. Методы вычисления векторов по дополнительным направляющим описаны в отдельном параграфе (см. ниже).
Масштабирование контура
При «движении» контура можно задавать дополнительный закон масштабирования контура относительно начала системы координат сечения или относительно произвольной точки пространства, связанной с системой координат сечения и движущейся вместе с ней. Коэффициент масштабирования может быть задан в таблице или с использованием дополнительной направляющей.
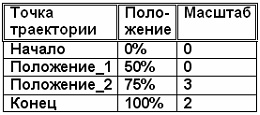
Таблица масштабов представляет собой набор точек траектории, в которых указано фиксированное значение масштабного коэффициента. Значение коэффициента в остальных точках траектории интерполируется системой автоматически.


При использовании дополнительной направляющей коэффициент масштабирования текущего промежуточного сечения получается из отношения длины вспомогательного вектора, рассчитанного в текущей точке траектории, и длины вспомогательного вектора, рассчитанного для первого сечения. Методы вычисления вспомогательных векторов с использованием направляющих описаны в отдельном параграфе (см. ниже).

При использовании точки масштабирования возможен выбор способа изменения контура относительно точки:
- изменять только размер контура, а расстояние от начала системы координат сечения до выбранной точки оставить неизменным;
- масштабировать только расстояние, сохранив исходные размеры контура;
- масштабировать и то и другое.



Создание тела по направляющим
При создании тела по направляющим используется контур, траектория и как минимум одна дополнительная направляющая. С помощью первой дополнительной направляющей рассчитывается первый вспомогательный вектор для каждого промежуточного сечения. Промежуточные точки для определения вспомогательных векторов на траектории и дополнительных направляющих всегда рассчитываются «по параметру». Этот вектор используется одновременно для масштабирования промежуточного сечения и для вычисления направления одной из осей системы координат промежуточного сечения (ориентации промежуточного сечения). Направление второй оси системы координат промежуточного сечения может рассчитываться автоматически (из векторного произведения полученного вспомогательного вектора и касательной к траектории в точке начала системы координат промежуточного сечения).
Если нужно ориентировать промежуточные сечения иначе, чем предлагает система, то можно использовать вторую дополнительную направляющую. При помощи неё система вычислит второй вспомогательный вектор для каждого промежуточного сечения. По двум вспомогательным векторам будет определена плоскость XY системы координат промежуточного сечения. Ось Y системы координат промежуточного сечения будет ориентирована в направлении, ближайшем ко второму вспомогательному вектору.
Способ создания тела по направляющим может быть использован для решения ряда специфических задач, таких например, как затягивание пространства между двумя кривыми при помощи поверхности, полученной из заданного контура. При создании такого тела предполагается, что исходный контур одной точкой будет лежать в начале первой направляющей, а второй своей точкой – в начале второй направляющей. В принципе, какой-то результат можно получить и при других исходных ориентациях контура, но при этом прогнозировать результат довольно сложно.
Если, например, исходный проволочный контур двумя крайними точками опирался на начало направляющих, то мы получим поверхность, соединяющую первую и вторую направляющие подобно исходному контуру.


Вместо первой и второй дополнительных направляющих можно использовать поверхности. При этом для ориентации контура будут использованы векторы-направления, вычисленные как нормали к поверхностям в точках, ближайших к точкам траектории. На практике чаще всего используются поверхности, граничащие с траекторией. Применение такого способа кручения контура при помощи поверхностей актуально в случаях, когда не применимы первые два способа ориентации контура - «перпендикулярно траектории» и «параллельно исходному». На следующем примере построено новое тело, в котором контур-отрезок ориентирован по нормали к дополнительной поверхности в каждой точке траектории.
Методы вычисления вспомогательных векторов с использованием направляющих
Вспомогательные векторы система использует для ориентации осей системы координат промежуточного сечения (поворота сечения) или для вычисления коэффициента масштабирования промежуточного сечения. При использовании дополнительной направляющей расчет вспомогательного вектора производится следующим образом. Начало каждого вспомогательного вектора для каждого промежуточного сечения находится на траектории – в точках начала систем координат промежуточных сечений. Вторые точки вспомогательных векторов, определяющие их направление, располагаются на дополнительной направляющей. Расчет вторых точек для определения вспомогательных векторов может производиться четырьмя методами.

По минимальному расстоянию. В качестве второй точки вектора будет взята точка направляющей, ближайшая к первой точке вектора на траектории.
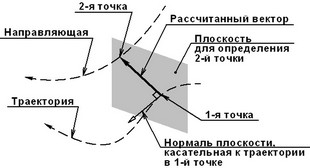
Перпендикулярно пути. Перпендикулярно траектории в первой точке строится плоскость. Эта плоскость должна пересечься с направляющей. В качестве второй точки используется точка пересечения плоскости и второй направляющей. Если в каких-то точках траектории нет пересечения перпендикулярной плоскости со второй направляющей, то выдается ошибка пересчета операции.
Пример применения опций «Перпендикулярно пути» и «По минимальному расстоянию»:


По параметру. Положение любой точки на кривой может быть задано параметром – значением, определяющим положение точки в процентах от длины кривой (0 – в начале кривой 1 – в конце кривой). Точка на направляющей берется с тем же значением параметра, что и у первой точки на траектории. Данный способ вычисления дополнительного вектора является наименее требовательным к ориентации и длине направляющих.
Данная опция автоматически применяется при использовании метода ориентации сечения «По направляющим». Также пользователь может её включать самостоятельно при задании закона масштабирования или кручения, например, когда дополнительная направляющая короче траектории или не подходят остальные способы.
Пример применения опции «По параметру»:
Исходные данные |
Построение операции с опцией "По параметру" |
По смещению. Вычисляется длина траектории от начала кривой до первой точки. Затем на этом же расстоянии от начала направляющей берётся вторая точка. При данном способе вычисления направления вспомогательная направляющая должна быть равна или больше по длине, чем траектория. Данная опция может применяться, когда, например, нужно использовать только часть вспомогательной направляющей, равной по длине периметру траектории.

Пример применения опции «По смещению»:

Правила задания операции
Общий алгоритм действий для создания операции следующий:
1. Выбрать способ ориентации контура.
2. Выбрать контур.
3. Выбрать элементы для задания траектории.
4. Задать коррекцию исходного положения контура. (Необязательное действие)
5. Задать дополнительные направляющие или поверхность. (Необязательное действие)
6. Задать общие параметры операции. (Необязательное действие.)
7. Подтвердить создание операции.
Выбор способа ориентации контура
Способ ориентации контура желательно установить в первую очередь, так как в зависимости от результата выбора система для дальнейших действий предложит определенный набор опций.
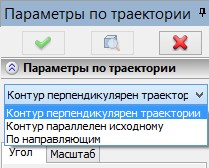
Выбор способа производится в окне свойств операции, в специальном поле с выпадающем списком. Выпадающий список содержит все три возможных варианта ориентации контура – «Контур перпендикулярен траектории», «Контур параллелен исходному», «По направляющим». Первое, и как показывает опыт, наиболее часто используемое значение, система предлагает по умолчанию. Так что если нужно ориентировать контур перпендикулярно пути, пункт по выбору способа ориентации контура можно пропустить.
При установке первых двух способов в автоменю остается набор опций для выбора траектории, коррекции исходного положения контура, выбора направляющих, задающих законы кручения и масштабирования. При выборе способа «По направляющим» в автоменю остаются опции для коррекции исходного положения контура, опции для выбора второй и третьей направляющих.
Выбор контура
Первая опция, которая включается в автоменю автоматически после вызова команды, предназначена для выбора контура:
![]() <R> Выбрать контур
<R> Выбрать контур
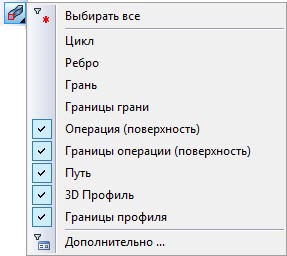
Опция представляет набор фильтров для селектора, помогающих выбирать нужные объекты. Пиктограмма имеет выпадающий список, который появляется после продолжительного нажатия ![]() . В качестве контура пригодны любые объекты с листовой или проволочной геометрией - 3D профили, 3D пути, рёбра, грани, поверхности и т.д. Элемент, выбранный для задания контура, подсвечивается.
. В качестве контура пригодны любые объекты с листовой или проволочной геометрией - 3D профили, 3D пути, рёбра, грани, поверхности и т.д. Элемент, выбранный для задания контура, подсвечивается.
Выбор траектории
После задания контура система автоматически включает опцию для выбора траектории:
![]() <T> Выбрать траекторию
<T> Выбрать траекторию
Опция также представляет набор фильтров для селектора, помогающих выбирать нужные объекты. В выпадающем списке можно установить, какие объекты с проволочной геометрией использовать для задания траектории -3D профили, 3D пути, рёбра, грани, поверхности и т.д. Элемент, выбранный для задания траектории, подсвечивается.
После выбора траектории становится доступной пиктограмма подтверждения операции ![]() . Введённых данных уже достаточно для создания операции. Выбранный контур будет двигаться из текущего положения вдоль траектории «перпендикулярно траектории» или «параллельно исходному».
. Введённых данных уже достаточно для создания операции. Выбранный контур будет двигаться из текущего положения вдоль траектории «перпендикулярно траектории» или «параллельно исходному».
Задание коррекция исходного положения контура
После выбора траектории система предлагает осуществить коррекцию исходного положения контура. Если выполнения этого шага не требуется, то можно перейти к следующим действиям, принудительно вызвав соответствующие опции автоменю.
Сначала система предлагает выбрать первую точку для привязки контура:
![]() <F> Выбрать стартовую точку положения контура
<F> Выбрать стартовую точку положения контура
Для выбора точки можно использовать ряд подходящих объектов. У опции есть выпадающий список, позволяющий настроить систему на выбор объектов нужного типа. После выбора точки новое изображение контура появляется возле начала траектории. Изображение сориентировано в соответствии с выбранным способом ориентации контура и привязано к началу траектории по выбранной точке.
После выбора первой точки можно перейти к следующим шагам. По умолчанию система предлагает продолжить коррекцию и поочерёдно включает опции для задания второй и третьей точек:
![]() <S> Задать вторую точку для привязки контура
<S> Задать вторую точку для привязки контура
![]() <O> Выбрать точку для задания поворота контура
<O> Выбрать точку для задания поворота контура
После выбора второй точки ничего в сцене не изменится. Система перейдет в режим ожидания выбора третьей точки. После выбора третьей точки изображение скорректированного контура будет довёрнуто на третью точку в соответствии с правилами, описанными в разделе «Основные возможности».
Задание фиксирующего направления и варианта фиксации ориентации контура
Задание фиксирующего направления является необязательным действием и может быть пропущено.
Задание фиксирующего направления возможно только в том случае, если не задан закон кручения контура (в табличной форме или с помощью направляющих).
Для указания вектора фиксирующего направления используются следующие опции автоменю:
![]() <L> Выбрать направление
<L> Выбрать направление
![]() <1> Выбрать первую точку, задающую направление
<1> Выбрать первую точку, задающую направление
![]() <2> Выбрать вторую точку, задающую направление
<2> Выбрать вторую точку, задающую направление
Опция ![]() позволяет задать вектор фиксирующего направления, указав один 3D элемент (ребро, прямой путь, и т.п.). Опции
позволяет задать вектор фиксирующего направления, указав один 3D элемент (ребро, прямой путь, и т.п.). Опции ![]() и
и ![]() используются для задания вектора направления с помощью двух 3D точек.
используются для задания вектора направления с помощью двух 3D точек.
Вариант фиксации (фиксация по пути и направлению, фиксация вращения) выбирается из выпадающего списка в диалоге окна свойств. |
|
Задание закона кручения контура
Задать закон кручения контура можно либо в таблице, либо с использованием вспомогательной геометрии. Последовательно рассмотрим оба способа.
Табличный способ задания кручения
В окне свойств на закладке «Угол» находятся поля для задания закона кручения.
Для создания новых условий кручения контура нажмите кнопку ![]() . При первом нажатии добавляются две характерные точки «Начало» и «Конец». При повторных нажатиях добавляются новые промежуточные точки на траектории. Численные данные для каждой промежуточной точки задаются в окне свойств. Положение каждой точки задаётся в процентах от длины траектории. Значение угла поворота сечения задается в градусах, в поле «Угол». Для удаления промежуточной точки нужно её выбрать и нажать кнопку
. При первом нажатии добавляются две характерные точки «Начало» и «Конец». При повторных нажатиях добавляются новые промежуточные точки на траектории. Численные данные для каждой промежуточной точки задаются в окне свойств. Положение каждой точки задаётся в процентах от длины траектории. Значение угла поворота сечения задается в градусах, в поле «Угол». Для удаления промежуточной точки нужно её выбрать и нажать кнопку ![]() .
.
Положение промежуточных точек можно задавать с помощью графиков. Для этого используется кнопка ![]() окна свойств. При нажатии на кнопку открывается окно редактирования графика. Область определения графика по оси X ограничена значениями 0-100. Область значений функции не ограничена.
окна свойств. При нажатии на кнопку открывается окно редактирования графика. Область определения графика по оси X ограничена значениями 0-100. Область значений функции не ограничена.
Для удобства задания параметров кручения в сцене отображаются вспомогательные элементы – манипуляторы и декорации.
Декорации представляют собой изображение промежуточного сечения для каждой заданной точки, а также стрелки с указанием направления и угла поворота. Стрелка развивается по спирали и показывает полный угол поворота. Это удобно, если угол поворота более 360 градусов. Декорации неактивной точки рисуются жёлтым цветом, а декорации точки, с которой производится в данный момент работа – красным.
Манипулятор представляет собой два отрезка голубого цвета, показывающих векторы нулевого и заданного углов. На концах одного отрезка-манипулятора имеется две «ручки». При воздействии на них мышкой с нажатой ![]() можно изменять значение угла поворота и положение точки на пути. При подведении курсора к «ручке» манипулятора курсор принимает соответствующую форму.
можно изменять значение угла поворота и положение точки на пути. При подведении курсора к «ручке» манипулятора курсор принимает соответствующую форму.
Использование вспомогательной геометрии для задания кручения
Выбрать направляющую для задания закона кручения можно при помощи опции:
![]() <W> Выбрать направляющую для задания закона кручения
<W> Выбрать направляющую для задания закона кручения
Для задания направляющей можно использовать любые объекты с проволочной геометрией.
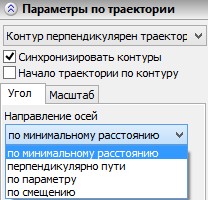
После выбора направляющей диалог в окне свойств автоматически переключается на отображение выпадающего списка, из которого можно выбрать метод вычисления вектора поворота. Для выбора доступны четыре варианта: «по минимальному расстоянию», «перпендикулярно пути», «по параметру», «по смещению».
Выбрать поверхность для задания закона кручения можно при помощи опции:
![]() <N> Выбрать поверхность для задания закона кручения
<N> Выбрать поверхность для задания закона кручения
Для задания поверхности можно использовать грань, листовой 3D профиль или операцию-поверхность.
При использовании вспомогательной геометрии манипуляторы и декорации не используются.
Задание закона масштабирования контура
Задать закон масштабирования контура можно либо в таблице, либо с использованием вспомогательной геометрии. Последовательно рассмотрим все способы.
Табличный способ задания масштабирования контура
В окне свойств на закладке «Масштаб» находятся поля для задания закона масштабирования. Принцип задания параметров точно такой же, как при задании кручения табличным способом.
Как и закон кручения, закон масштабирования контура можно задавать или редактировать и в графической форме. Для этого используется кнопка ![]() окна свойств. При нажатии на кнопку открывается окно редактирования графика. Область определения графика по оси X ограничена значениями 0-100. Область значений функции тоже ограничена – запрещено задавать значения радиуса меньше 0.
окна свойств. При нажатии на кнопку открывается окно редактирования графика. Область определения графика по оси X ограничена значениями 0-100. Область значений функции тоже ограничена – запрещено задавать значения радиуса меньше 0.
Дополнительно в окне свойств имеется выпадающий список для регулировки параметров масштабирования относительно точки привязки.
При задании закона масштабирования табличным способом в сцене также отображаются манипуляторы и декорации.
Декорации представляют собой изображение промежуточного сечения для каждой промежуточной точки. Декорации неактивной точки рисуются жёлтым цветом, а декорации для точки, с которой производится в данный момент работа – красным. Также рисуются две окружности – одна голубого цвета, другая красного или желтого цвета, в зависимости от того, активна ли данная точка. Две окружности нужны, чтобы можно было быстро оценить степень масштабирования. Размер голубой окружности всегда остаётся постоянным, а другая окружность меняет свой размер в зависимости от значения масштабно коэффициента. По радиусу второй окружности нарисован манипулятор - стрелка желтого или красного цвета. На концах стрелки есть две ручки, при помощи которых можно менять положение точки и значение масштабного коэффициента.
Выбор направляющей и дополнительной точки для масштабирования
Выбрать направляющую для задания закона масштабирования можно при помощи опции:
![]() <А> Выбрать направляющую для задания закона масштабирования
<А> Выбрать направляющую для задания закона масштабирования
Задать точку, относительно которой будет рассчитываться масштабирование, можно опцией:
![]() <V> Выбрать точку масштабирования
<V> Выбрать точку масштабирования
Для выбора можно использовать любые объекты, способные определить 3D точку.
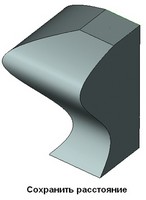
После выбора точки в окне свойств становится доступен выпадающий список, управляющий способами масштабирования относительно точки. Можно выбрать один из трёх пунктов – «Сохранить размер», «Сохранить расстояние», «Изменить расстояние и размер».
Задание тела по направляющим
Отличие метода «по направляющим» от методов «перпендикулярно траектории» и «параллельно исходному» заключается в том, что обязательно нужно выбрать одну направляющую, которая одновременно будет задавать и закон масштабирования, и закон кручения. При этом нельзя выбрать метод вычисления векторов и точку масштабирования, но можно задать коррекцию исходного положения профиля при помощи одной или трёх точек. Во время коррекции система ведет себя точно так же, как и при установленном параметре «перпендикулярно траектории».
Выбор второй направляющей производится при помощи опции, которая появляется автоматически при выборе метода «по направляющим»:
![]() <W> Выбрать направляющую, задающую масштаб и кручение контура
<W> Выбрать направляющую, задающую масштаб и кручение контура
Для выбора доступны любые объекты с проволочной геометрией. Однако для успешного создания операции на направляющей не должно быть изломов. Выбранный объект подсвечивается (по умолчанию зеленым цветом).
Выбрать направляющую поверхность для задания закона кручения можно при помощи опции:
![]() <N> Выбрать поверхность для задания закона кручения
<N> Выбрать поверхность для задания закона кручения
Для задания поверхности можно использовать грань, листовой 3D профиль или операцию-поверхность.
При необходимости уточнить ориентацию промежуточных сечений можно выбрать третью направляющую при помощи опции:
![]() <A> Выбрать направляющую, задающую ориентацию контура
<A> Выбрать направляющую, задающую ориентацию контура
Для задания ориентацию контура с помощью направляющей поверхности используется опция:
![]() <Ctrl+A> Выбрать направляющую поверхность, задающую ориентацию контура
<Ctrl+A> Выбрать направляющую поверхность, задающую ориентацию контура
Дополнительные возможности операции
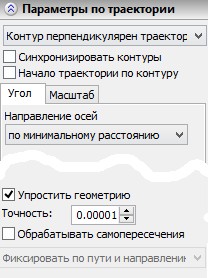
Синхронизировать контуры. При установке данного флажка направление траектории изменяется на противоположное.
Начало траектории по контуру. Параметр предназначен для случаев использования замкнутой траектории, когда четко не определена начальная точка. При включённом флаге в качестве начальной точки (от которой будет строиться тело по траектории) автоматически выбирается ближайшая к контуру точка на траектории.
Упростить геометрию. Данная установка позволяет строить аналитические поверхности (плоскости, цилиндры, сферы и торы) там, где это возможно. При отключённом параметре всегда строится точная сплайновая поверхность.
Точность. Параметр устанавливает допуск к создаваемой поверхности – отклонение полученной поверхности от точного решения. Измеряется в метрах.
Обрабатывать самопересечения. Данный параметр позволяет исправлять некоторые случаи самопересечений, возникающих при создании операции.
Операция «Тело по траектории» относится к группе кинематических операций, поэтому при её создании можно воспользоваться рядом дополнительных возможностей, присущих большинству кинематических операций:
- Создание тонкостенного элемента вместо твёрдого тела.
- Придание заданной толщины стенкам создаваемого тела.
- Сглаживание в начале, в конце, боковых рёбер.
- Более подробное описание этих возможностей приведено в команде "3X - Выталкивание".
Использование создаваемого тела в булевой операции
Для создания булевой операции необходимо:
1.Включить режим создания булевой операции с помощью опции автоменю:
|
<Ctrl+B> |
Режим создания булевой операции: «Сложение» |
Булева операция создаётся при нажатой пиктограмме.
2.Выбрать тип создаваемой операции с помощью опции автоменю, содержащей выпадающий список:
|
<Ctrl+'+'> |
Сложение |
|
<Ctrl+'-'> |
Вычитание |
|
<Ctrl+’*’> |
Пересечение |
|
<Ctrl+’I’> |
Интеллектуальный |
Принцип действия интеллектуального режима:
●Если создаваемое тело и выбранное тело (явно или неявно) имеют пересечение объемами - тип булевой операции: вычитание.
●Если создаваемое тело полностью лежит внутри выбранного тела - тип булевой операции: вычитание.
●Если создаваемое тело касается выбранного тела – тип булевой операции: сложение.
●Если условия, указанные в пунктах 1, 2, 3, не выполнены, или выбранное тело лежит внутри создаваемого, или при определении типа проникновения тел возникла ошибка – тип булевой не определен, булева операция не будет создана.
3.Выбрать первый операнд булевой операции (в некоторых случаях – необязательное действие) с помощью опции автоменю:
|
<Ctrl+T> |
Выбрать исходное тело для булевой операции |
Если в сцене присутствует всего одно тело, то оно выбирается автоматически. Создаваемое в операции "По траектории" новое тело является вторым операндом булевой операции.
После подтверждения создания операции сначала создаётся тело по траектории, а затем выполняется булева операция заданного типа.
Создание операции с использованием твёрдого тела
В команде По траектории имеется возможность использовать твёрдое тело в качестве исходного объекта, перемещающегося вдоль выбранной траектории. При этом во время перемещения тело вращается вокруг заданной оси. След, оставляемый телом, может быть использован впоследствии, например, для булевой операции.
Команда позволяет моделировать след, который при обработке оставляет фреза.
Для создания операции требуется:
●Выбрать формирующее твёрдое тело ![]() ,
,
●Выбрать траекторию ![]() ,
,
●Выбрать направление оси вращения тела ![]() ,
,
●Выбрать точку привязки оси вращения тела ![]() ,
,
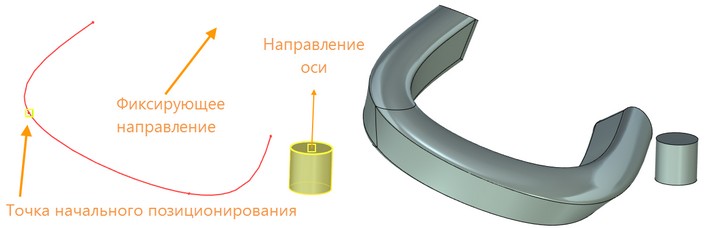
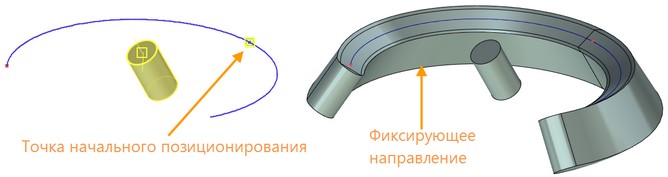
●Выбрать фиксирующее направление ![]() , точку начального позиционирования
, точку начального позиционирования ![]() и используемые грани тела
и используемые грани тела ![]() (необязательные действия).
(необязательные действия).
Опции операции
Для выбора формирующего твёрдого тела используется опция:
|
<M> |
Выбрать формирующее твёрдое тело |
В качестве формирующего тела может быть выбрано только твёрдое тело. Нельзя выбрать листовое тело или сеточную модель.
Неважно где именно располагается обрабатывающее тело по отношению к траектории.
Нужно учесть, что большие габариты обрабатывающего тела по сравнению с заданной траекторией могут привести к возникновению самопересечений и невозможности создания операции.
После выбора формирующего тела необходимо выбрать траекторию, по которой оно будет двигаться, с помощью опции:
|
<T> |
Выбрать траекторию |
В качестве траектории может использоваться, например, путь, расположенный на плоскости или в пространстве.
Траектория может быть замкнутой. Для замкнутой траектории нужно обязательно задать точку начального позиционирования.
Траектория должна быть расположена перпендикулярно к оси вращения формирующего тела, если не выбрано фиксирующее направление, которое задаёт ориентацию формирующего тела.
Во время перемещения тело будет вращаться. Поэтому нужно задать направление оси, вокруг которой оно будет вращаться, с помощью опции:
|
<A> |
Выбрать направление оси вращения формирующего тела |
После выбора оси, необходимо выбрать точку её привязки.
|
<S> |
Выбрать точку привязки оси вращения формирующего тела |
Точка привязки оси определит положение тела относительно траектории, так как точка привязки будет лежать на выбранной траектории.
Фиксирующее направление задаёт ориентацию формирующего тела относительно траектории.
Для выбора фиксирующего направления обрабатывающего тела используется опция:
|
<L> |
Выбрать фиксирующее направление |
Фиксирующее направление можно задать двумя точками с помощью опций:
|
<1> |
Выбрать 1-ю точку фиксирующего направления |
|
<2> |
Выбрать 2-ю точку фиксирующего направления |
Фиксирующее направление не обязано совпадать с направлением оси вращения формирующего тела.
Если при создании пространственной траектории направление оси обрабатывающего тела и фиксирующее направление не совпадают, необходимо дополнительно задать точку начального позиционирования.
Пространственная траектория должна отвечать следующему требованию: все кривые траектории должны быть аналитическими кривыми, кривыми типа C2 или неэкспортированными спиральными кривыми.
Фиксирующее направление не должно совпадать ни в одной точке с касательной к траектории.
Дополнительную информацию о фиксирующем направлении можно прочитать в разделе “Основные возможности операции”.
Для задания точки начального позиционирования обрабатывающего тела используется опция:
|
<V> |
Выбрать точку для начального позиционирования |
Задание положение точки начального позиционирования на траектории влияет на форму тела, полученного в результате выполнения операции.

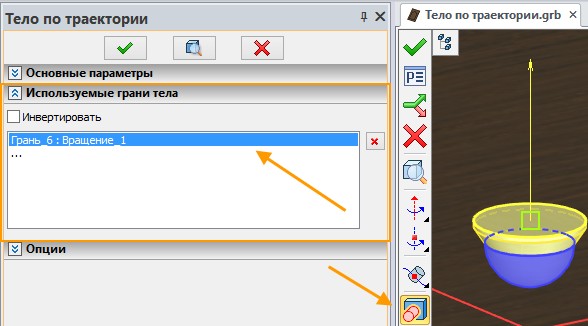
С помощью опции Выбрать используемые грани тела ![]() , у обрабатывающего тела можно выбирать используемые грани.
, у обрабатывающего тела можно выбирать используемые грани.
|
<F> |
Выбрать используемые грани тела |
Только выбранные грани будут участвовать в операции. Если установить флаг Инвертировать, то выбранные грани не будут участвовать в операции.
Результирующее тело можно использовать для булевой операции.
Подробнее о булевых операциях можно прочитать в главе "Булева операция".
Если обрабатывающее тело должно находиться на некотором расстоянии от траектории, необходимо снять флаг Совместить точку привязки оси вращения с началом траектории.
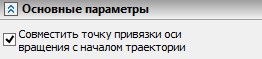
В этом случае после задания всех основных параметров операции, необходимо дополнительно выбрать фиксирующее направление и точку начального позиционирования.
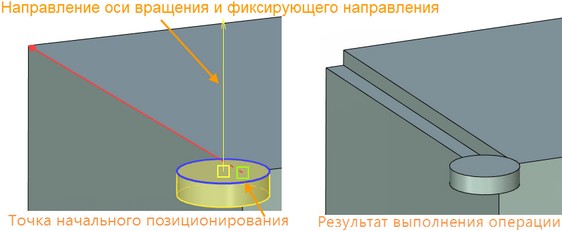
Если обрабатывающее тело не расположено на траектории, траектория должна быть задана кривой типа G1.
Например, фиксирующее направление может совпадать с направлением оси вращения формирующего тела. Точка начального позиционирования может находиться в начале траектории.
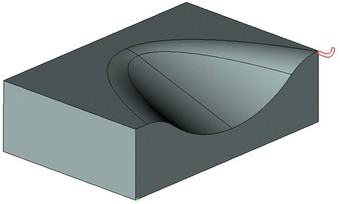
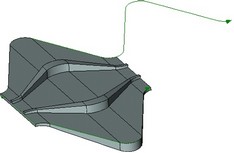
Пример использования твёрдого тела для создания операции
Например, требуется создать канавку на дверце. Для этого создаётся траектория на обрабатываемом теле и обрабатывающее тело нужной формы:
Траектория на обрабатываемом теле:
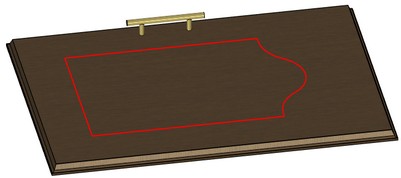
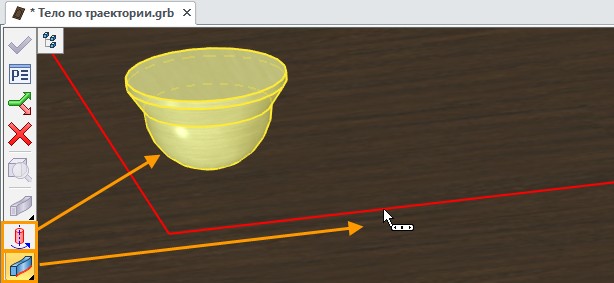
Обрабатывающее тело:

После активации команды необходимо выбрать обрабатывающее тело и траекторию:
Для обрабатывающего тела задаётся ось вращения ![]() и точка привязки оси вращения
и точка привязки оси вращения ![]() .
.
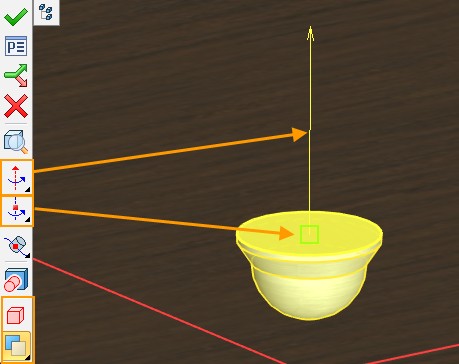
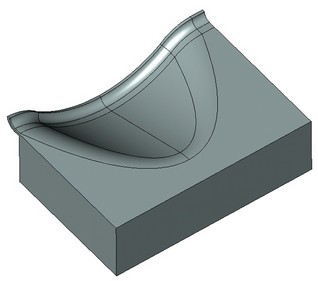
Затем обрабатывающее тело перемещается вдоль заданной траектории, одновременно вращаясь вокруг указанной оси, формируя канавку.
С учётом использования опции булевой операции Вычитание в итоге получаем следующий результат:

Пример можно найти в директории: "Примеры 3D 15\Новые возможности версии 15\Твёрдое тело по траектории" файл "Тело по траектории.grb".
В диалоге параметров операции, вызываемом опцией ![]() , можно задать общие параметры операции.
, можно задать общие параметры операции.
Смотри: Содержание, КомандыT-FLEX CAD 3D в алфавитном порядке