Сопряжения и степени свободы



Сопряжения и степени свободы |
|
При проектировании твердотельных сборочных моделей в T-FLEX CAD часто возникает необходимость задания взаимного расположения деталей, которая не всегда может быть решена только при помощи традиционного для T-FLEX CAD способа привязки с использованием локальных систем координат (ЛСК). Это связано с тем, что изменение расположения деталей должно быть взаимным. Одна деталь может иметь одновременно несколько контактов с другими подвижными деталями. При использовании подхода с использованием ЛСК в таких случаях может возникать рекурсия (зависимость от самого себя) в задании связей. Подобные задачи возникают, например, при создании моделей механических систем (механизмов). Для решения таких задач существуют сопряжения – элементы системы, позволяющие назначить различные связи на геометрические объекты двух операций-компонентов (3D точки, оси, кривые, плоскости и поверхности).
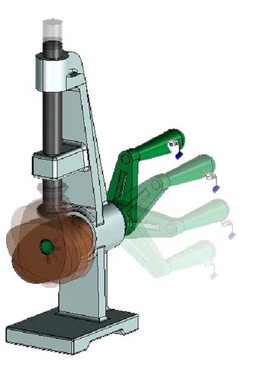
Модель механизма, спроектированную при помощи сопряжений, можно заставить двигаться в специальной команде, перемещая её детали с помощью курсора.

Для привязки 3D фрагментов по ЛСК можно задать дополнительные условия в виде разрешенных степеней свободы. Если впоследствии такой 3D фрагмент привязать в сборке при помощи ЛСК к другому сопряженному элементу, то он будет включен в расчёт сопряженного механизма. Метод позиционирования деталей сборки при помощи сопряжений может быть использован как дополнительный способ привязки, совместно с использованием привязки по локальным системам координат. Использование сопряжений требует дополнительных вычислительных ресурсов компьютера для поисков решений. В связи с этим прибегать к использованию сопряжений рекомендуется, когда другие способы для решения упомянутых задач по тем или иным причинам не подходят.
Что такое сопряжение?
Инструмент «Сопряжения» предназначен для взаимной привязки элементов сборочной модели. Он позволяет располагать их в соответствии с заданными геометрическими условиями. Эти условия задают взаимное расположение объектов трёхмерной модели (граней, рёбер, вершин, характерных точек, осей поверхностей вращения и т.д.) друг относительно друга. Система автоматически решает набор сопряжений и находит расположение объектов, удовлетворяющее заданным условиям. Сопряжения позволяют точно расположить детали проектируемого механизма относительно друг друга. Они позволяют заложить в модель механизма определённые свойства, определить, как его компоненты перемещаются и вращаются относительно других деталей. Для более точного задания ограничений одного элемента сборки относительно другого можно использовать комбинацию различных сопряжений. Отношение между двумя компонентами является ассоциативным. Если переместить одну деталь, то другая деталь переместится вместе с ней. Например, если винт привязан к отверстию, то при перемещении отверстия винт также будет перемещаться.
Сопряжения накладываются на пару геометрических объектов. Они либо связывают между собой два компонента, либо привязывают одно тело к внешней среде (закреплённому объекту). Закреплённым объектом называется такой объект, у которого ограничены все степени свободы, или его положение в пространстве остаётся постоянным. Рекомендуется, чтобы, по крайней мере, один компонент механизма был зафиксирован в пространстве. Это создаёт «опору» для всех других сопряжённых деталей и может предотвратить неожиданное перемещение компонентов механизма.
Каждое сопряжение является объектом модели, занимающим своё место в её структуре. Как полноценный объект системы сопряжение имеет имя, рабочие свойства, отображается в структуре 3D модели. Пользователь может гасить часть сопряжений, чтобы на время исключать их из общего решения. Это позволяет экспериментировать с различными типами сопряжений без переопределения взаимосвязей механизма.
Привязка 3D фрагмента по ЛСК
3D фрагмент, нанесенный на сборку с использованием локальных систем координат, тоже может участвовать в 3D модели, построенной на сопряжениях. Для определения поведения 3D фрагмента относительно ЛСК привязки в параметрах фрагмента задаются разрешенные степени свободы. Всего существует 6 степеней – по 3 на перемещения и на повороты относительно осей ЛСК. Для каждой степени свободы дополнительно может быть установлено ограничение движения в виде диапазона значений.
Можно также заранее задать степени свободы в параметрах исходной ЛСК, в файле фрагмента. При вставке 3D фрагмента условия со степенями свободы копируются в экземпляр 3D фрагмента и впоследствии учитываются при расчёте комплекса сопряжений спроектированной сборочной 3D модели.

Если при создании 3D фрагмента целевая ЛСК не была указана, т.е. фрагмент был привязан «по умолчанию», то механизм степеней свободы будет к нему не применим.
При проектировании целостных сборок-механизмов с использованием степеней свободы и сопряжений важно учитывать следующий момент. 3D фрагмент, который добавляется в сборку с привязкой по ЛСК, может быть либо связан с каким-нибудь компонентом сборки, либо – нет. В последнем случае поведение компонента при перемещении компонентов сборки может не соответствовать ожидаемому. Например, он останется на месте, когда окружающие его детали переместятся, или, наоборот, его перемещение не приведет к перемещению соседних деталей.
Для того чтобы 3D фрагмент оказался связанным с другим компонентом, необходимо, чтобы его целевая ЛСК привязки была построена на геометрических объектах этого компонента. Иначе он будет привязан к неподвижной среде.
Для создания сложных сборок в системе реализован механизм «Агрегатов». Данный механизм позволяет создавать сопряжения сначала в модели 3D фрагмента, которые впоследствии автоматически будут учитываться при работе такого 3D фрагмента в сборке.
Для создания сопряжения используется команда "3CT - Сервис|Сопряжения|Создать сопряжения".
Для динамического просмотра движений собранного механизма используйте команду "3CM - Сервис|Сопряжения|Перемещение сопряжённых элементов".
Приёмы работы с готовыми сопряжениями
Работа с деревом модели
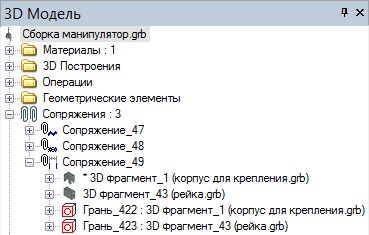
Созданные сопряжения отображаются в окне «3D модель». Вся работа с созданными сопряжениями в основном осуществляется через это служебное окно. В дереве модели создаётся отдельная папка, в которую система автоматически помещает все сопряжения. Для каждого типа сопряжения рисуется пиктограмма, соответствующая типу сопряжения. Возле каждого сопряжения имеется знак ![]() . Если нажать на него
. Если нажать на него ![]() , то в раскрытой ветке дерева модели будут отображены объекты, на основе которых создано сопряжение. Сопряжения можно дополнительно группировать в подпапки. Допускается создавать только один уровень подпапок. Все папки сопряжений обозначаются пиктограммой
, то в раскрытой ветке дерева модели будут отображены объекты, на основе которых создано сопряжение. Сопряжения можно дополнительно группировать в подпапки. Допускается создавать только один уровень подпапок. Все папки сопряжений обозначаются пиктограммой ![]() . Каждая дополнительная папка имеет уникальное название. Группирование по дополнительным папкам ни на что не влияет. Оно используется только для удобства работы при сортировке большого количества сопряжений.
. Каждая дополнительная папка имеет уникальное название. Группирование по дополнительным папкам ни на что не влияет. Оно используется только для удобства работы при сортировке большого количества сопряжений.
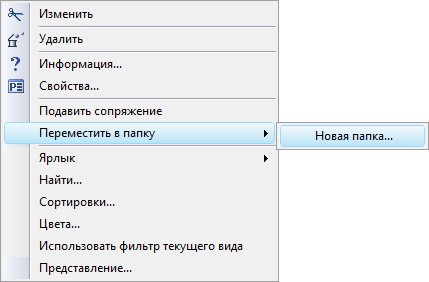
Для переноса сопряжения в другую папку воспользуйтесь пунктом контекстного меню «Переместить сопряжение в папку». В новом подменю доступны команды для создания новой дополнительной папки сопряжений, перемещения в основную и уже существующие дополнительные папки.
Остальные команды этого контекстного меню являются общими для многих элементов системы («Свойства», «Изменить», «Удалить», «Информация…»).
Подавление сопряжений
Любое сопряжение можно подавить. Команда для подавления сопряжения и отмены подавления находится в контекстном меню при выборе сопряжения ![]() . Также можно вызвать подавление сразу группы сопряжений, если вызвать команду из контекстного меню кликом по папке сопряжений. Подавленное сопряжение помечается в дереве модели голубым крестом и исключается из расчёта сопряжений.
. Также можно вызвать подавление сразу группы сопряжений, если вызвать команду из контекстного меню кликом по папке сопряжений. Подавленное сопряжение помечается в дереве модели голубым крестом и исключается из расчёта сопряжений.
Оптимальная длина цепочек сопряжений
При создании механизма одна деталь «цепляется» к внешней среде, другие детали посредством сопряжений стыкуются друг к другу. Таким образом, ряд деталей, последовательно состыкованных друг с другом, можно представить как цепочку сопряжений. Если к одной детали присоединено одновременно несколько других деталей, то цепочка сопряжений разветвляется. При создании механизмов необходимо стремиться к максимально коротким цепочкам. Более короткие цепочки решаются быстрее и при этом возникает меньшая погрешность вычислений.
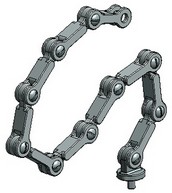
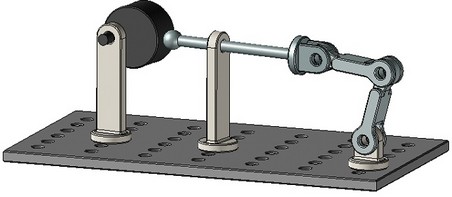
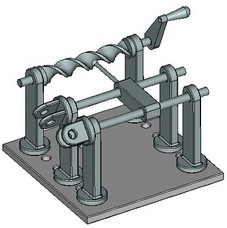
Рассмотрим следующий характерный пример – необходимо создать модель простого механизма, показанную на рисунке. Механизм представляет собой соединение шарнирного типа, объединяющее вместе три детали – опору, рычаг и ось. Наиболее рациональным способом в данном случае будет создание двух маленьких цепочек сопряжений, а не одной длинной.
Рычаг нужно при помощи сопряжений соосности и совпадения плоских граней сразу привязать к опоре. Ось также при помощи соосности и совпадения привязывается к любой детали, например, к опоре. Получается две цепочки сопряжений: опора-рычаг и опора-ось. В данном случае нерационально было бы, например, к опоре привязать ось, а к оси привязывать рычаг, так как получилась бы более длинная цепочка сопряжений «опора-ось-рычаг».
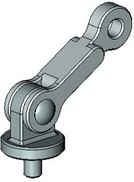

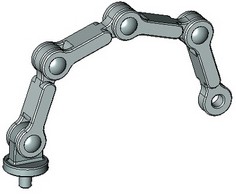
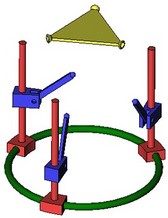
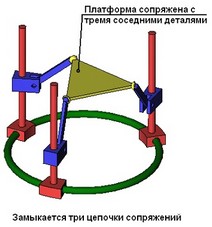
Пример механизма Детали механизма Усложнение механизма (добавление новых сопряжений)
![]()
![]()
Рациональная цепочка Нерациональная цепочка
Конечно, на таком простом примере сколько-нибудь заметного ухудшения производительности системы не произойдет, но в более сложных случаях разница становится заметна.
Рекомендации по совместному использованию привязки по ЛСК и сопряжений
В данном разделе рассмотрены рекомендуемые правила совместного использования сопряжений и привязки ЛСК при создании сборок. Привязка деталей по сопряжениям в большинстве случаев должна использоваться совместно с привязкой по ЛСК. Причём, приоритетным следует считать традиционный способ – привязку фрагментов при помощи систем координат. У этого способа есть ряд преимуществ перед сопряжениями.
Во-первых, некоторые типы геометрических связей, в том числе наиболее часто используемые (одноосевой шарнир), могут быть решены одной ЛСК, а для связи при помощи сопряжений может потребоваться создание связки, например, из двух или более сопряжений. В частности, одноосевой шарнир создаётся двумя сопряжениями (соосность + совпадение торцевых граней) или только одной ЛСК (разрешен поворот вокруг одной оси). Из этого главного преимущества вытекают следующие:
●В целом, система работает быстрее (сокращается длина цепочек сопряжений, меньше погрешность вычислений, проще расчёт).
●Формируется более простая структура модели, за счет того, что не создается лишних элементов (сопряжений).
●Обеспечивается большая устойчивость к топологическим изменениям модели (за счет минимального использования топологических элементов тел).
Когда же оправдано использование сопряжений? Для ответа на этот вопрос рассмотрим процесс проектирования сборки. С точки зрения интересующего нас вопроса, как правило, перед конструктором могут стоять 2 задачи.
Задача 1: создание сборочной модели без возможности «движения» механизма. Пользователь заранее знает, что он проектирует, что его модель после завершения сборки не должна будет двигаться, это ему не нужно. К примеру, если мы проектируем телевизор или дом, то вряд ли понадобится «оживлять» их в динамическом режиме.
Когда перед пользователем стоит подобная задача, то при наполнении сборки деталями решается один основной вопрос – как правильно расположить деталь на сборке. Наиболее эффективное решение даёт «традиционный» способ – вставка 3D фрагментов с использованием ЛСК. В дополнение к общим преимуществам этого метода, от пользователя потребуется меньшее количество действий. Механизм вставки 3D фрагмента требует меньше времени за счет того, что нужно определить меньшее количество элементов:
1. Исходную ЛСК (выбор может выполняться автоматически).
2. Место привязки (выбор целевой ЛСК или геометрии для её создания осуществляется в 3D окне).
В то же время каждое новое сопряжение потребовало бы определения геометрических данных для двух компонентов, а для точного расположения компонента, как правило, нужно создать несколько сопряжений.
Прибегать к использованию сопряжений следует:
- в сложных случаях геометрического взаимодействия;
- когда требуется расположить на сборке деталь, которая имеет контакт с другими деталями в нескольких местах.
Задача 2: построение сборки с возможностью «оживления» спроектированного механизма в команде перемещения сопряженных элементов. В таком случае все части собранного механизма должны правильно взаимодействовать друг с другом. Для всех подвижных частей должны быть обязательно описаны необходимые условия для расчёта системы сопряжений при движении механизма.
В данной ситуации рекомендуется придерживаться правил, приведенных ниже.
- Для деталей, которые не должны изменять своего положения относительно элементов, к которым привязаны, рекомендуется использовать ЛСК без степеней свободы. К примеру, гайка, надетая на болт, всегда должна следовать за болтом и не должна иметь перемещений относительно болта.
- Для деталей, изменяющих взаимное положение, в первую очередь нужно использовать ЛСК со степенями свободы. Это даст выигрыш по всем основным преимуществам (см. выше).
Сопряжения используются при привязке деталей в следующих случаях:
- Для деталей, имеющих сложные геометрические взаимодействия.
- Для деталей, имеющих более одного контакта с несколькими подвижными соседними деталями.
- Для замыкания цепочек сопряжений. При этом каждая цепочка может быть создана с использованием ЛСК со степенями свободы.
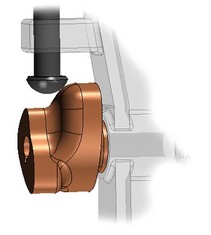
- Для задания различных ограничений, например, на взаимное проникновение деталей. В качестве примера можно рассмотреть гидроцилиндр, где задано ограничения в виде условия «расстояние=0» (см раздел «Типы сопряжений»)
Смотри: Содержание, Команды T-FLEX CAD 3D в алфавитном порядке