Типы сопряжений



Типы сопряжений |
|
Типы сопряжений
При создании геометрических связей в виде сопряжений можно использовать только такие геометрические понятия, как 3D точка, ось, кривая, плоскость, поверхность. Для выбора геометрических данных пользователь указывает топологические элементы модели или элементы построения. Использование 3D элементов построения возможно при условии, что они построены на основе тела операции. В ином случае второй компонент окажется привязанным к неподвижной среде.
При привязке к элементам построения теряется возможность динамического перемещения данного соединения в сопряженном механизме, поэтому по возможности лучше использовать топологические элементы модели (вершины, ребра, грани и т.д.)
При создании сопряжений важно понимать отличие геометрических данных, используемых в сопряжениях, от топологических объектов, используемых при выборе. Например, плоская грань имеет границы, а плоскость, которая используется в сопряжении – бесконечна. Поэтому созданная геометрическая связь на основе плоской грани будет действовать и за пределами этой грани.
Совпадение
Данный тип сопряжения обеспечивает постоянное полное совпадение одного геометрического объекта с другим. Количество оставшихся степеней свободы зависит от вида геометрии сочетаемых объектов. Например, совмещение двух точек создаст сферический шарнир, у которого заблокировано любое перемещение и разрешен любой поворот. Совмещение точки с кривой позволит элементам не только поворачиваться, но и перемещаться вдоль кривой. В следующей таблице приведены возможные сочетания геометрических элементов при создании совпадения:
Совпадение |
Точка |
Ось |
Кривая (кроме окружности) |
Окружность |
Поверхность (кроме конусной поверхности) |
Конусная поверхность |
Плоскость |
Проволочное тело |
Листовое тело |
Твёрдое тело |
Точка |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
Ось |
+ |
- |
- |
- |
- |
- |
+ |
- |
- |
- |
Плоскость |
+ |
+ |
- |
- |
- |
- |
+ |
- |
- |
- |
Окружность |
- |
- |
- |
- |
- |
+ |
- |
- |
- |
- |
Конусная поверхность |
- |
- |
- |
+ |
- |
- |
- |
- |
- |
- |
Точка может лежать на любом геометрическом объекте. Если выбраны две плоские грани, то они будут лежать в одной плоскости. Совпадение оси и плоскости обеспечит положение оси в плоскости грани. Условие совпадения точки и твёрдого тела обеспечит постоянное положение точки на его поверхности. При выборе кривой-окружности и конусной поверхности будет обеспечено совпадение выбранной поверхности с окружностью таким образом, чтобы плоскость окружности была перпендикулярна оси конуса.
При помощи совпадения в сочетании с другими типами сопряжений можно имитировать различные механические соединения. Например, совпадением пары 3D точек можно создать сферический шарнир.


Параллельность, перпендикулярность
Эти типы сопряжений обеспечивают взаимную параллельность и перпендикулярность выбранных геометрических объектов. Они представляют собой частный случай сопряжения типа «угол» (см. далее). В следующей таблице приведены возможные сочетания геометрических элементов при создании сопряжений параллельности или перпендикулярности:
Параллельность, Перпендикулярность |
Точка |
Ось |
Кривая |
Поверхность |
Плоскость |
Проволочное тело |
Листовое тело |
Твёрдое тело |
Ось |
- |
+ |
- |
- |
- |
- |
- |
- |
Плоскость |
- |
+ |
- |
- |
+ |
- |
- |
- |
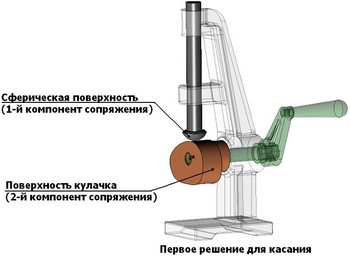
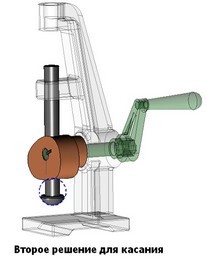
Касание
Касание обеспечивает постоянный физический контакт между двумя геометрическими объектами. В зависимости от типа геометрии взаимодействующих объектов контакт может осуществляться в одной точке (например, плоскость и сфера) или вдоль прямой (плоскость и цилиндр). Данный тип сопряжения можно установить между двумя плоскостями, плоскостью и поверхностью, двумя поверхностями.
Касание любого тела с поверхностью работает только для сферической поверхности.
Касание |
Точка |
Ось |
Кривая |
Поверхность |
Плоскость |
Проволочное тело |
Листовое тело |
Твёрдое тело |
Поверхность |
- |
- |
- |
+ |
+ |
+ |
+ |
+ |
Плоскость |
- |
- |
- |
+ |
+ |
+ |
+ |
+ |
Иногда существует несколько вариантов решения стыковки выбранных объектов. Например, если выбрана плоскость и сфера, решением являются две точки касания. В случае неоднозначности система самостоятельно принимает решение. Как правило, в качестве решения выбирается ближайшая точка к текущему положению механизма. Для перехода в другую область решения при движении механизма используйте режим движения «перетаскивание» (см. ниже).
При неоднозначности решения рекомендуется перед созданием сопряжения переместить сопрягаемые компоненты в область требуемого результата. Части сопряженного механизма можно переместить в команде «3СМ - Перемещение сопряженных элементов». Компоненты, не участвующие в созданных ранее опряжениях, можно передвинуть, используя команду «3EG - Преобразование».
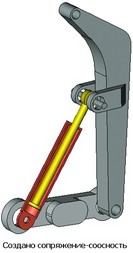
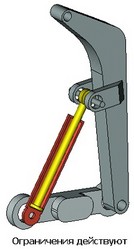
Соосность
«Соосность» - это частный случай сопряжения типа «совпадение». Оно обеспечивает совпадение двух осей. Этот тип сопряжения является одним из наиболее часто используемых. Как правило, этот тип сопряжения задействуется в сочетании с другими типами. Например, для привязки осевой детали к отверстию часто используется совпадение (торцевых плоских граней) в сочетании с соосностью. Для задания соосности можно выбирать элементы модели, способные определить ось (поверхности вращения, эллиптические рёбра, прямые ребра и т.д.).
На иллюстрациях показана привязка частей условного гидроцилиндра при помощи соосности. Остальные части этого простого механизма сопряжены на локальных системах координат. Для наглядности некоторые детали механизма разрезаны по оси.
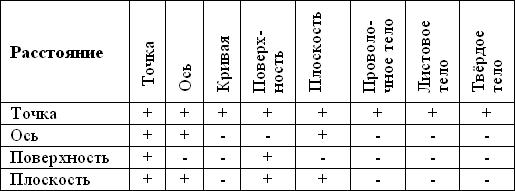
Расстояние
Сопряжение «расстояние» задаёт связь между двумя объектами, выполняя условие по сохранению заданного расстояния между двумя геометрическими объектами. Можно задать условия типа «не больше», «не меньше» или «равно» заданному значению.
В следующей таблице приведены возможные сочетания геометрических элементов при создании сопряжения «расстояние»:
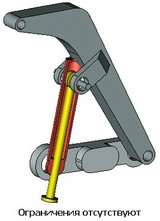
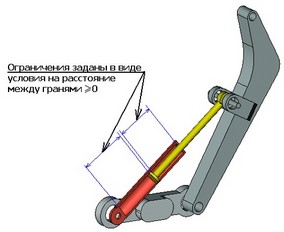
Этот тип сопряжения, например, можно использовать для задания смещения объектов или для ограничения на взаимное проникновение граней. Для задания ограничения на взаимопроникновение граней деталей достаточно задать условие расстояния «не меньше» нуля. При этом могут получаться механизмы, работающие за счет физического взаимодействия (соударения) частей.
Продолжая пример с гидроцилиндром, покажем, как можно использовать сопряжение «расстояние». Созданный на предыдущем шаге механизм при некоторых движениях будет работать неправильно из-за того, что части гидроцилиндра могут проникать друг в друга. Эту проблему решает сопряжение «расстояние». Можно задать условие, что расстояние между соответствующими гранями поршня должно быть больше или равно нулю. При кинематическом перетаскивании сопряжений это даст правильную картину поведения механизма.
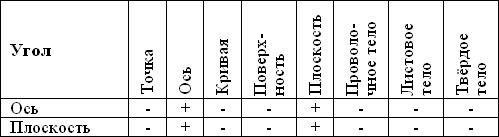
Угол
Данное сопряжение задаёт угловое расстояние между двумя геометрическими объектами. Угол разворота можно использовать для поворота стыкуемого компонента в нужную позицию. Как и в случае с «расстоянием», в данном типе сопряжения можно использовать условие. При задании такой связи, как правило, существует два или более решений.
В следующей таблице приведены возможные сочетания геометрических элементов при создании сопряжения «угол»:
Передача типа «Колеса» (угловые скорости)
Данный тип сопряжения предназначен для создания условий взаимодействия двух тел, вращающихся вокруг двух осей. Условия задаются в виде передаточного отношения между двумя вращающимися объектами, то есть, на какое количество оборотов повернётся один компонент при повороте другого. После создания этого сопряжения образуется двухсторонняя связь. При помощи данного сопряжения удобно моделировать механизмы, в которых участвуют, например, зубчатые или ременные передачи.
Следует понимать, что данный тип передаточной связи, как и любое другое передаточное сопряжение, лишь указывает системе взаимное отношение угловых (в данном случае) скоростей. При этом каждый компонент к моменту создания передаточного сопряжения уже должен быть закреплен на своем месте и иметь все необходимые степени свободы и ограничения.
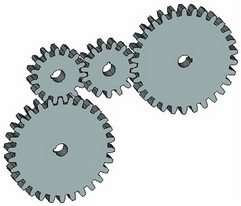
Для создания этого сопряжения нужно выбрать две оси вращения и задать передаточное отношение. В данном случае форма шестеренок для системы не важна, зубья колес можно создать только для «косметических» целей. Закон движения механизма будет определяться исключительно условиями сопряжений.
Передача типа «Винт» (колесо-рейка)
Данный тип сопряжения предназначен для создания условий взаимодействия двух тел, при котором один компонент вращается, а другой перемещается вокруг одной или разных осей. При помощи этого типа сопряжения можно моделировать, например, гайку, которая накручивается на винт, передаточное звено типа «колесо-рейка» и т.д. Условия сопряжения задаются в виде значения перемещения, которое совершит вдоль заданной оси подвижный компонент при повороте на 1 оборот другого компонента. После создания этого сопряжения образуется двухсторонняя связь.
Для создания сопряжения требуется определить ось для каждого их двух компонентов и задать, на какое количество модельных единиц должен перемещаться один компонент при повороте другого на 360 градусов. Первой определяется ось «колеса», второй – ось «рейки»
Передача типа «Отношение линейных скоростей»
Если в модели имеется два объекта, движущихся вдоль осей, то при помощи данного сопряжения можно задать коэффициент, характеризующий взаимное смещение двух объектов. При установленной подобной связи перемещение второго компонента будет вычисляться умножением значения перемещения первого компонента на заданный коэффициент. Связь может работать и в обратном направлении (от второго компонента к первому), в этом случае система применит коэффициент, обратный заданному. При помощи данного сопряжения можно моделировать механизмы, состоящие из системы блоков, механизмы с гидравликой и т.п.

Для создания сопряжения требуется определить ось для каждого их двух компонентов и задать в специальном поле величину отношения скоростей движущихся компонентов.
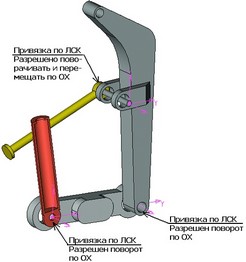
Привязка 3D фрагмента по ЛСК
3D фрагмент, нанесенный на сборку с использованием локальных систем координат, тоже может участвовать в 3D модели, построенной на сопряжениях. Для определения поведения 3D фрагмента относительно ЛСК привязки в параметрах фрагмента задаются разрешенные степени свободы. Всего существует 6 степеней – по 3 на перемещения и на повороты относительно осей ЛСК. Можно также заранее задать степени свободы в параметрах исходной ЛСК, в файле фрагмента. При вставке 3D фрагмента условия со степенями свободы копируются из параметров ЛСК в параметры 3D фрагмента и впоследствии учитываются при расчёте комплекса сопряжений спроектированной сборочной 3D модели.

Если при создании 3D фрагмента целевая ЛСК не была указана, т.е. фрагмент был привязан «по умолчанию», то механизм степеней свободы будет к нему неприменим.
При проектировании целостных сборок-механизмов с использованием степеней свободы и сопряжений важно учитывать следующий момент. 3D фрагмент, который добавляется в сборку с привязкой по ЛСК, может быть либо связан с каким-нибудь компонентом сборки, либо – нет. В последнем случае поведение компонента при перемещении компонентов сборки может не соответствовать ожидаемому. Например, он останется на месте, когда окружающие его детали переместятся, или, наоборот, его перемещение не приведет к перемещению соседних деталей.
Для того чтобы 3D фрагмент оказался связанным с другим компонентом, необходимо, чтобы его целевая ЛСК привязки была построена на геометрических объектах (вершинах, ребрах, гранях) этого компонента. Иначе он будет привязан к неподвижной среде.
Для создания сложных сборок в системе реализован механизм «Агрегатов». Данный механизм позволяет создавать сопряжения сначала в модели 3D фрагмента, которые впоследствии автоматически будут учитываться при работе такого 3D фрагмента в сборке.
Смотри: Содержание, Команды T-FLEX CAD 3D в алфавитном порядке