Перемещение сопряженных элементов |
  
|
Перемещение сопряженных элементов |
|
Вызов команды:
Пиктограмма |
Лента |
|---|---|
|
3D модель > Дополнительно > Сопряжения > Перемещение элементов Сборка (3D) > Сопряжения > Переместить Листовой металл (3D) > Дополнительно > Сопряжения > Перемещение элементов |
Клавиатура |
Текстовое меню |
<3CM> |
Сервис > Сопряжения > Перемещение элементов |
После вызова команды требуется выбрать нужную деталь механизма для задания движения. Движение задаётся перетаскиванием выбранной детали при помощи курсора. При этом пользователь имитирует воздействие на механизм, как если бы к выбранной точке детали была приложена сила, направленная в сторону курсора в плоскости экрана. Под воздействием силы деталь механизма начинает двигаться. Движение ограничено заданными сопряжениями с другими деталями и внешним пространством. Выбранная деталь тянет за собой другую и т.д., пока в движение не будет вовлечён весь механизм. При этом во время движения учитывается масса и моменты инерции перемещаемых компонентов.
Любые параметры перемещения и поворота сопряженных объектов записываются в параметры каждой сопряженной операции. Для этого в параметрах операции создаётся специальный вид преобразования Преобразование сопряжений. Все количественные параметры этого преобразования рассчитываются системой автоматически.
При перемещении сопряжённых элементов следует учитывать несколько важных факторов:
1. Точные количественные параметры перемещения не задаются.
2. После завершения команды перемещения по ![]() положение деталей точно вернуть в предыдущее состояние нельзя. В крайнем случае, это можно сделать только посредством выполнения отмены действий в текущей сессии.
положение деталей точно вернуть в предыдущее состояние нельзя. В крайнем случае, это можно сделать только посредством выполнения отмены действий в текущей сессии.
3. При перемещении модели механизма, для которого оформлен сборочный чертёж, есть опасность невосстановимого изменения чертежа, построенного проецированием. Это произойдет после обновления проекции, из-за нового положения деталей сборки и сложности точного возврата к предыдущему состоянию положения деталей.
Настройка режимов движения осуществляется в окне параметров.
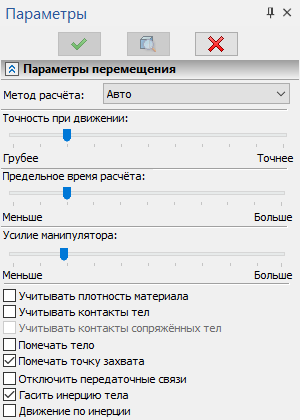
Метод расчёта устанавливает один из двух доступных методов расчёта – точный или быстрый. Точный метод нужно применять для систем содержащим до нескольких десятков шарниров, чем больше порядок системы, тем медленнее будет работать расчёт. Для систем включающих в себя сотни шарниров расчёт может работать неудовлетворительно медленно. В таких случаях следует применять быстрый метод, который одинаково хорошо справляется и с большими и с маленькими системами. Режим Авто разрешает системе подобрать метод расчёта самостоятельно в зависимости от сложности модели.
Для перемещения деталей механизма используется режим кинематического манипулятора. При этом формируется плавное движение. Оно имитирует следствие приложения силы в точку, за которую пользователь тянет деталь. Движение строится с учётом всех заданных ограничений. При достижении границы области решений механизм останавливается.
Точность при движении. Задаёт заниженный уровень точности вычислений для более быстрого расчёта и соблюдения условий сопряжения в момент движения механизма.
Предельное время расчёта. Задаёт количество шагов-вычислений, которое разрешается применить системе для достижения точности вычислений при движении.
Усилие манипулятора. Этот параметр регулирует степень воздействия мыши на точку перетаскивания тела. Параметр определяет приложенное усилие и, следовательно, скорость перемещения перетаскиваемых деталей после нажатия мыши.
Учитывать плотность тел. Для более точной имитации движения механизма имеется возможность учитывать реальную плотность при расчёте массы его деталей. В противном случае плотность устанавливается одинаковой для всех компонентов.
Учитывать контакты тел. Для более точной имитации движения механизма имеется возможность учитывать контакты тел, кроме контактов между сопряжёнными друг с другом телами.
Учитывать контакты сопряжённых тел. Данный флаг можно установить только при установленном флаге Учитывать контакты тел. Дополнительно учитываются контакты тел, сопряжённых друг с другом. При учёте контактов сопряжённых тел следует иметь в виду, что есть риск возникновения лишних контактов, способных привести к нежелательным последствиям.
Помечать тело. Вспомогательный параметр, позволяющий включать/отключать пометку детали механизма, за которую тянет пользователь для создания движения.
Помечать точку захвата. Данный параметр включает пометку точки, за которую тянет курсор. Точка помечается крестиком. Эту функцию можно использовать при отключении пометки тела.
Отключить передаточные связи. Данная настройка позволяет отключать передаточные сопряжения. Эту возможность удобно использовать для приведения звеньев передач к исходному взаимному соответствию (например, контактное зацепление зубьев шестеренок).
Гасить инерцию тела. Данный параметр позволяет отключать и подключать учет инерции тел.
Движение по инерции. Данный параметр позволяет учитывать инерцию без ее угасания со временем.
Запись анимации перемещения сопряженных элементов
В команде перемещения сопряжённых элементов существует возможность записи анимации. Данная возможность активируется по нажатию опции Создать анимацию.
После нажатия опции система переходит в режим ожидания перемещения сопряженных объектов. Пока будут перемещаться объекты - будет записываться анимация. Во время перемещения фиксируются кадры и время. После окончания перемещения активируются опции по редактированию записи.
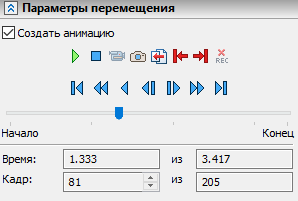
![]() - Пуск
- Пуск
![]() - Стоп
- Стоп
![]() - Создать видеоролик. Открывает окно настройки создания видеоролика. Опция доступна после нажатия кнопки Стоп.
- Создать видеоролик. Открывает окно настройки создания видеоролика. Опция доступна после нажатия кнопки Стоп.
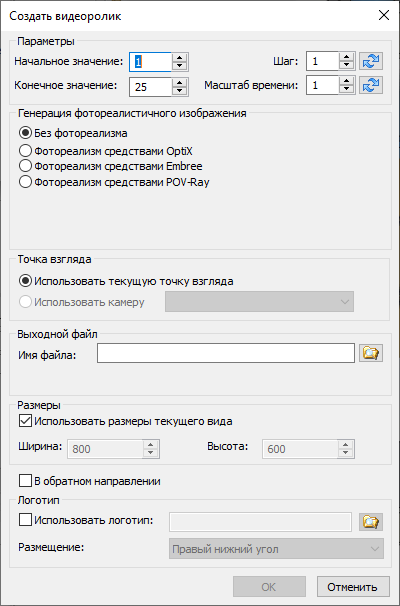
Основные параметры данного окна аналогичны параметрам окна записи сценария разборки на видео.
Исключением является наличие кнопок ![]() выбора Оптимальной длительности видео без изменения количества кадров и выбора Оптимального шага записи кадров без изменения длительности видео.
выбора Оптимальной длительности видео без изменения количества кадров и выбора Оптимального шага записи кадров без изменения длительности видео.
Доступна возможность сохранить файл в форматы *.avi и *.wmv. После задания настроек, система начнёт обработку кадров и после завершения обработки видеозапись будет сохранена в указанном месте на диске.
![]() - Снимок. Открывает окно настройки скриншота 3D окна.
- Снимок. Открывает окно настройки скриншота 3D окна.
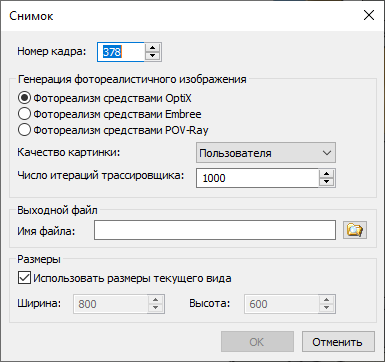
В данном окне присутствует возможность выбора номера кадра для снимка и часть параметров из окна создания видеоролика.
Доступна возможность сохранить файл в форматы *.png, *.bmp и *.jpeg. После задания настроек откроется окно генерации фотореализма, в котором система обработает изображение должным образом и сохранит его в указанное место на диске.
![]() - Экспортировать результаты. Опция имеет два варианта - Экспортировать анимацию и Выгрузить геометрию в файл.
- Экспортировать результаты. Опция имеет два варианта - Экспортировать анимацию и Выгрузить геометрию в файл.
Первый вариант активен только после нажатия кнопки Стоп. После активации опции открывается окно настройки, аналогичное окну экспорта сценария разборки. Доступна возможность экспортировать сценарий в форматы *.wrl, *.x3d, *.pov, *.u3d, *.pdf.
Второй вариант позволяет сохранить геометрию модели в формат *.grb именно в том положении, в котором она находится на момент вызова команды. В сохраненной модели в качестве тел будут использоваться ссылки на операции в родительской модели.
![]() - Обрезать до текущей позиции. Позволяет обрезать кадры до текущей позиции.
- Обрезать до текущей позиции. Позволяет обрезать кадры до текущей позиции.
![]() - Обрезать после текущей позиции. Позволяет обрезать кадры после текущей позиции.
- Обрезать после текущей позиции. Позволяет обрезать кадры после текущей позиции.
![]() - Удалить запись.
- Удалить запись.
![]() - К началу.
- К началу.
![]() - Перемотать назад. Позволяет перемотать анимацию назад с помощью удерживания левой кнопки мыши.
- Перемотать назад. Позволяет перемотать анимацию назад с помощью удерживания левой кнопки мыши.
![]() - Назад. Позволяет запустить анимацию в обратную сторону.
- Назад. Позволяет запустить анимацию в обратную сторону.
![]() - Предыдущий кадр.
- Предыдущий кадр.
![]() - Следующий кадр.
- Следующий кадр.
![]() - Перемотать вперёд. Позволяет перемотать анимацию вперёд с помощью удерживания левой кнопки мыши.
- Перемотать вперёд. Позволяет перемотать анимацию вперёд с помощью удерживания левой кнопки мыши.
![]() - В конец.
- В конец.
См. также: