Вытягивание тела По траектории |
  
|
Вытягивание тела По траектории |
|
В команде По траектории имеется возможность использовать твёрдое тело в качестве исходного объекта, перемещающегося вдоль выбранной траектории. Для этого необходимо активировать опцию:
|
Вытягивание тела по траектории |
При этом во время перемещения тело вращается вокруг заданной оси. След, оставляемый телом, может быть использован впоследствии, например, для булевой операции.
Команда позволяет моделировать след, который при обработке оставляет фреза.
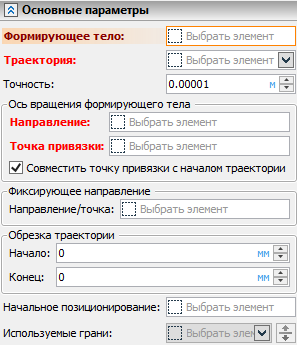
Для создания операции требуется:
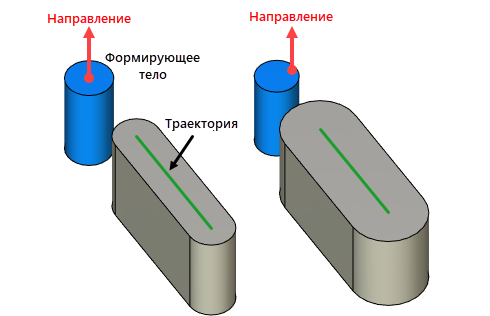
•Выбрать формирующее твёрдое тело,
•Выбрать траекторию,
•Выбрать направление оси вращения тела,
•Выбрать точку привязки оси вращения тела,
•Выбрать фиксирующее направление, точку начального позиционирования и используемые грани тела (необязательные действия).
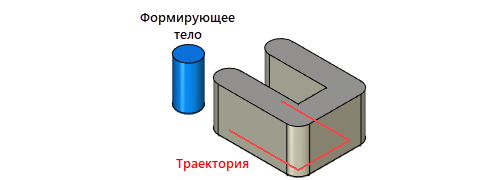
Формирующее тело
В качестве формирующего тела может быть выбрано только твёрдое тело. Нельзя выбрать поверхность или сеточную модель.
Неважно где именно располагается обрабатывающее тело по отношению к траектории.
Нужно учесть, что большие габариты обрабатывающего тела по сравнению с заданной траекторией могут привести к возникновению самопересечений и невозможности создания операции.
После выбора формирующего тела необходимо выбрать траекторию, по которой оно будет двигаться.
В качестве траектории может использоваться, например, путь, расположенный на плоскости или в пространстве.
Траектория
Траектория может быть замкнутой. Для замкнутой траектории нужно обязательно задать точку начального позиционирования.
Траектория должна быть расположена перпендикулярно к оси вращения формирующего тела, если не выбрано фиксирующее направление, которое задаёт ориентацию формирующего тела.
![]()
Точность устанавливает допуск к создаваемой поверхности – отклонение полученной поверхности от точного решения. Измеряется в метрах.
Ось вращения формирующего тела
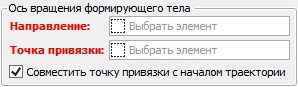
Во время перемещения тело будет вращаться. Поэтому нужно задать направление оси, вокруг которой оно будет вращаться.
После выбора оси, необходимо выбрать точку привязки.
Точка привязки
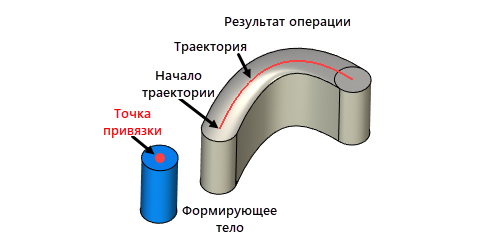
Точка привязки оси определит положение тела относительно траектории, так как точка привязки будет лежать на выбранной траектории.
Если обрабатывающее тело должно находиться на некотором расстоянии от траектории, необходимо снять флаг Совместить точку привязки оси вращения с началом траектории.
В этом случае после задания всех основных параметров операции, необходимо дополнительно выбрать фиксирующее направление и точку начального позиционирования.
Если обрабатывающее тело не расположено на траектории, траектория должна быть задана кривой типа G1.
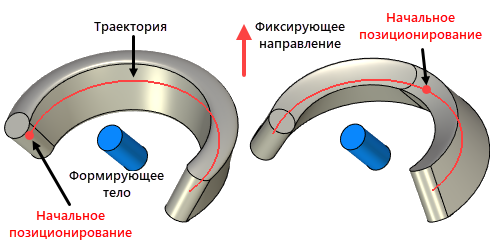
Например, фиксирующее направление может совпадать с направлением оси вращения формирующего тела. Точка начального позиционирования может находиться в начале траектории.
Фиксирующее направление
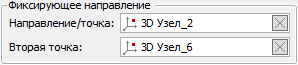
Фиксирующее направление задаёт ориентацию формирующего тела относительно траектории. Его можно задать либо направлением, либо двумя точками.
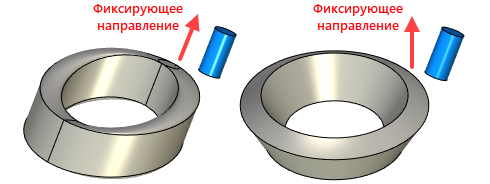
Фиксирующее направление не обязано совпадать с направлением оси вращения формирующего тела.
Если при создании пространственной траектории направление оси обрабатывающего тела и фиксирующее направление не совпадают, необходимо дополнительно задать точку начального позиционирования. Задание положение точки начального позиционирования на траектории влияет на форму тела, полученного в результате выполнения операции.
Пространственная траектория должна отвечать следующему требованию: все кривые траектории должны быть аналитическими кривыми, кривыми типа C2 или неэкспортированными спиральными кривыми.
Фиксирующее направление не должно совпадать ни в одной точке с касательной к траектории.
Используемые грани
С помощью опции Используемые грани, у обрабатывающего тела можно выбирать используемые грани.
Только выбранные грани будут участвовать в операции. Если установить флаг Инвертировать ![]() , то выбранные грани не будут участвовать в операции.
, то выбранные грани не будут участвовать в операции.
Результирующее тело можно использовать для булевой операции.