Плоскость через плоское ребро или точки |
  
|
Плоскость через плоское ребро или точки |
|
Вызов команды:
Пиктограмма |
Лента |
|
Опорная геометрия > Рабочие поверхности > Плоскость через плоское ребро или точки |
Клавиатура |
Текстовое меню |
<3KSF> |
|
Автоменю команды |
|
<3> |
Через плоское ребро или точки |
Данная команда позволяет построить рабочую плоскость по точкам или плоскому ребру. В качестве точек можно выбирать вершины, ребра, 3D узлы, ЛСК и др.
На основе выбранной 3D точки можно построить следующие виды рабочих плоскостей:
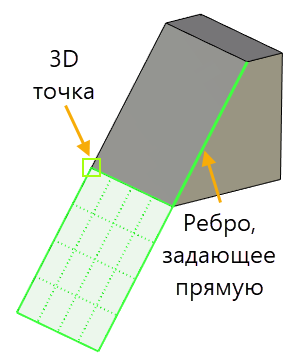
•через 3D точку и прямое ребро;
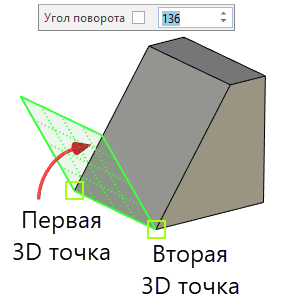
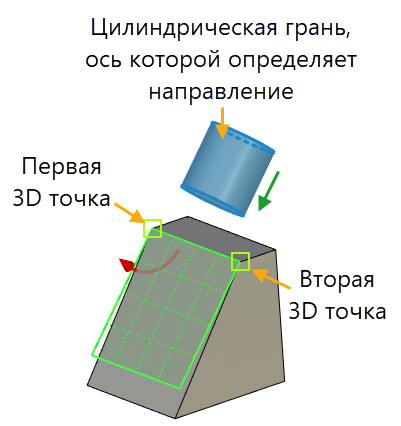
•через две 3D точки и заданное направление (или через две точки со смещением на угол относительно заданного направления);
•через две 3D точки под углом к плоскости;
•через 3D точку касательно к поверхности (конической или цилиндрической);
•через две 3D точки касательно к поверхности (конической, цилиндрической или сферической);
•через ось касательно к поверхности (конической, цилиндрической или сферической);
Команда включает два режима создания рабочей плоскости - По точкам, По касательной.
Для построения рабочей плоскости, проходящей через 3D точку и прямое ребро, необходимо выбрать 3D точку (опция Точки) и доопределить положение рабочей плоскости в пространстве, указав объект (опция Положение), геометрия которого может определить прямую (ось Х на РП будет направлена вдоль выбранной прямой, ось У перпендикулярна ей и проходит через точку начала системы координат) или задав ещё две 3D точки, определяющие направление осей Х и У.
Для построения рабочей плоскости, проходящей через две 3D точки, необходимо просто выбрать две 3D точки (опция Точки). Рабочая плоскость строится как проходящая через ось, заданную выбранными 3D точками. Положение рабочей плоскости в пространстве выбирается системой произвольно. При необходимости положение рабочей плоскости можно изменить, повернув её на заданный угол относительно исходного положения. Угол задаётся в окне параметров команды либо прямо в 3D окне с помощью манипулятора.
Для построения рабочей плоскости, проходящей через две 3D точки и заданное направление, необходимо выбрать две 3D точки (опция Точки) и 3D элемент, определяющий направление (опция Положение). Направление может быть задано плоским ребром или 3D путём, нормалью к поверхности, осью цилиндрической или конической поверхности и т.п.
При необходимости можно задать угол смещения рабочей плоскости от заданного направления (в окне параметров или в 3D окне с помощью манипулятора).
Для построения рабочей плоскости, проходящей через две 3D точки под углом к плоскости, необходимо выбрать две 3D точки (опция Точки) и плоскость (опция Положение). Для задания плоскости можно выбрать другую рабочую плоскость, плоскую грань, плоское ребро, ЛСК и т.п. Как и в предыдущих случаях, угол задаётся в окне параметров или в 3D окне с помощью манипулятора.
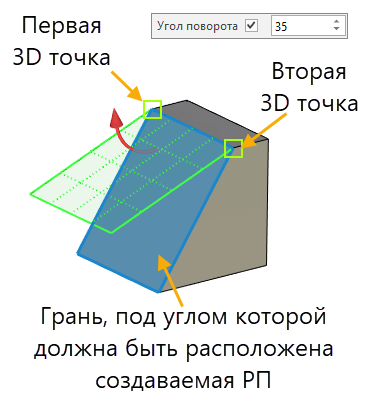
Если задать положение по грани, то создаваемая рабочая плоскость примет форму этой грани.
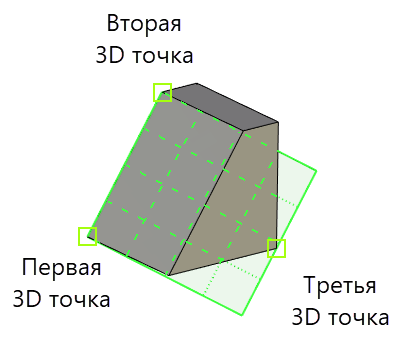
Для построения рабочей плоскости, проходящей через три 3D точки, необходимо просто выбрать три 3D точки (опция Точки). Ось Х системы координат созданной рабочей плоскости будет направлена от первой выбранной точки ко второй, а ось Y будет ей перпендикулярна.
В данном режиме отображаются манипуляторы в виде бирюзовых шариков, символизирующие возможные варианты касания. Переключаться между вариантами можно, указав ![]() нужный манипулятор. Касательная поверхность подсвечивается в 3D сцене синим цветом.
нужный манипулятор. Касательная поверхность подсвечивается в 3D сцене синим цветом.
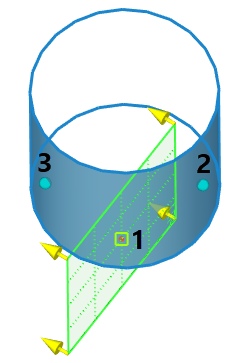
Для построения рабочей плоскости, проходящей через 3D точку касательно к конической или цилиндрической поверхности, после задания 3D точки (опция Точки) необходимо выбрать нужную поверхность (опция Касательная). Из двух возможных вариантов касания будет выбрана то, что ближе к положению курсора при выборе поверхности.
|
1 - Выбранная точка |
2 - Манипулятор выбранного варианта касания |
3 - Манипулятор альтернативного варианта касания |
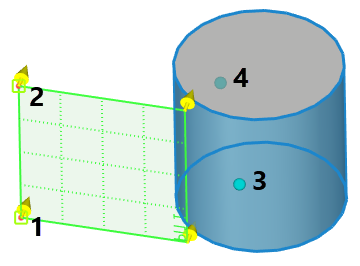
Для построения рабочей плоскости, проходящей через две 3D точки касательно к поверхности (конической, цилиндрической или сферической), необходимо выбрать две 3D точки (опция Точки) и поверхность (опция Касательная). По умолчанию ось Х системы координат созданной рабочей плоскости будет направлена от первой выбранной точки ко второй.
|
1 и 2 - Выбранные точки |
3 - Манипулятор выбранного варианта касания |
4 - Манипулятор альтернативного варианта касания |
При выборе конической или цилиндрической поверхности касания результат построения может быть аналогичен построению рабочей плоскости по одной 3D точке с касанием к поверхности. Задание второй точки поможет лишь уточнить вариант касания.
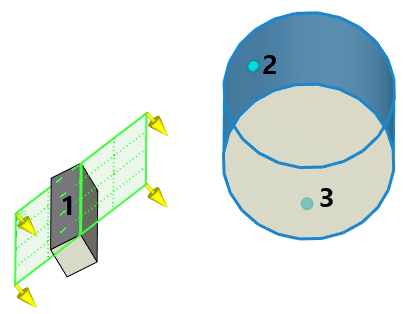
Для построения рабочей плоскости, проходящей через ось касательно к поверхности (конической, цилиндрической или сферической), необходимо выбрать ось (опция Точки) и поверхность (опция Касательная). По умолчанию ось Х системы координат созданной рабочей плоскости будет совпадать с направлением выбранной оси.
|
1 - Выбранная ось |
2 - Манипулятор выбранного варианта касания |
3 - Манипулятор альтернативного варианта касания |
Дополнительные параметры команды описаны в соответствующем разделе.
Порядок построения
1. Вызовите команду Плоскость через плоское ребро или точки.
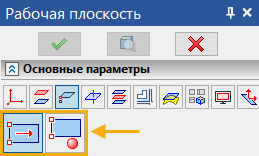
2. Выберите тип По точкам или По касательной.
3. Укажите точки.
4. Задайте положение/касательную (необязательное действие).
5. Задайте сторону рисования эскиза (необязательное действие).
6. Задайте систему координат рабочей плоскости (необязательное действие).
7. Задайте дополнительные параметры (необязательное действие).
8. Подтвердите создание рабочей плоскости.